

El desarrollo de la automatización y la robótica está permitiendo que las empresas medianas y pequeñas puedan incorporar sistemas de guiado automático de vehículos en sus procesos productivos
Las compañías están exigiendo manejar los materiales necesarios con más rapidez, con más precisión y con más exactitud. El conocimiento del proceso productivo y el control de su gasto resulta imprescindible si se quiere mantener una posición dentro del mercado. Cada vez más se tiende a centrar todas las energías en crear negocio y expandirlo, sin olvidar que el proceso productivo debe proporcionar por si mismo una alta calidad, a un coste bajo. En numerosas ocasiones, estar primero es mejor que ser más grande. Numerosos productos tienen ciclos de vida muy cortos y no dejan lugar para los errores. Todo tiene que ir rápido, y a un costo más bajo. Esto exige mantener un control completo con acceso constante a información del sistema de producción y procesar y manejar esta información para obtener el máximo rendimiento de los recursos de la empresa.
Uno de los problemas para resolver es el propio movimiento de las mercancías dentro del proceso productivo, resulta imprescindible tener que trasladar de un lado a otro materias primas y productos semielaborados. Si observamos el movimiento de esas mercancías, muchas de ellas siguen rutas comunes, y se necesita personal para trasladarlas de un lugar a otro; este personal realiza tareas repetitivas y monótonas, están desmotivados por falta de objetivos en el trabajo, no tienen metas que cumplir, a menudo tienen exceso de confianza en los vehículos que manejan, y un error en estos procesos genera perdidas económicas, y en algunos casos, desgracias personales. De la misma forma que se tiende a automatizar procesos complejos, podemos plantear automatizaciones de transporte. Hasta hace poco, el desarrollo de la robótica no podía cubrir la necesidad de automatizar estas tareas, con los últimos avances en este campo, podemos abordar este problema con garantías de éxito, además, automatizar tareas de transporte mediante vehículos autónomos, es más flexible que los sistemas de transporte tradicionales, como cintas, cadenas y demás ingenios de instalación fija, y sobre todo, pudiendo ofrecer un sistema que se puede acoplar a máquinas ya existentes en la empresa, permitiendo de esta forma disponer de una máquina que en modo manual se comporta como una máquina convencional, y en modo automático es capaz de realizar tareas de transporte sin necesidad de conductor, no se pierde el capital ya invertido en la maquina de transporte existente, y además, este método permite automatizar tareas de transporte sin un gasto excesivo, permitiendo la disponibilidad de la máquina automatizada para tareas de transporte convencional, creando un dispositivo con una dualidad automáticamanual muy interesante.
Este artículo pretende informar y animar a la pequeña y mediana empresa a realizar inversiones en este campo; hasta la fecha, un proyecto de este tipo sólo podía ser abordado por grandes empresas, con lotes de fabricación altos que justifican la inversión. Incluso, a veces, he llegado a oír que no es rentable este tipo de tecnología, por crear una gran dependencia del producto con el proceso productivo. Es todo lo contrario, una automatización de este tipo sólo obliga a trabajar de una forma más disciplinada, pero la cantidad de información y capacidad de reacción que crea, compensa con creces el ‘esfuerzo’ de ‘disciplinar’ la producción.
No sólo obtenemos mejoras en el transporte; podemos enumerar algunas de las ventajas obtenidas de este tipo de aparatos:
- – Aumentar la velocidad y productividad en la manipulación y manejo de los materiales.
- – Aumento de la seguridad para el personal que trabaja en planta; este sistema permite definir qué niveles de seguridad adicionales se requieren.
- – Ahorro considerable en el costo de los daños causados al género transportado.
- – Ahorro en el mantenimiento de los vehículos, ya que la conducción programada es la óptima en cada momento.
Valorar económica y objetivamente todos los puntos mencionados es difícil, dependen mucho de la empresa y de la solución planteada. En este estudio no se pretende llenar al lector de estadísticas. Pero comentemos brevemente el tema de la seguridad. Según la estadística de accidentes en España de 1998, el 1,67% de accidentes mortales fue debido a ‘choque contra objetos móviles’, el 6,05% fue por ‘atrapamiento por vuelco de maquinas o vehículos’, y el 25,67% por ‘atropellos o golpes por vehículos’ La suma de estas tres causas, que de una forma u otra están provocadas por el transporte de materiales dentro de las empresas, da un resultado estremecedor: 33,39%. Un tercio de muertes en el puesto de trabajo, están relacionadas con vehículos y con el movimiento de materiales. Es curioso, si vemos la estadística de accidentes con baja, del mismo año, el 2,60% fue por ‘atropello por vehículos’, y el 2,25% por ‘choque contra objetos móviles’. Solo podemos llegar a una conclusión, con los vehículos hay pocas bajas, y muchos muertos.
Las ventajas están claras, soluciones hechas a medida del cliente, incluso utilizando la maquinaria que ya disponen, pueden ser apropiadas para muchas empresas, no exigen demasiada inversión, y descargan enormemente las tareas tediosas y repetitivas de llevar una cosa de un lugar a otro, con la suficiente precisión para solucionar el problema planteado, una gran parte de empresas estarían dispuestas a pagar un precio medio por automatizar tareas de transporte mediante vehículos autónomos.
Métodos para automatizar la conducción
Pero, ¿cómo podemos plantear automatizar la conducción? Es obvio que, a primera vista, es un problema harto difícil, puesto que, para una persona, la conducción está basada en sentidos como la vista y el oído, en nuestra capacidad de escoger un camino u otro, de escoger una solución u otra ante el mismo problema planteado, es esta libertad la que crea un conflicto entre la disciplina de un proceso productivo y la capacidad creativa del ser humano.
Analicemos qué hacemos cuando tenemos que desplazarnos de un sitio a otro, para evitar la respuesta basada en nuestra ágil memoria, imaginemos que el lugar y la ruta no nos resulta familiar. La primera cosa que hacemos es situar el punto donde nos encontramos, encontrándolo en un mapa, después fijamos el lugar de destino, y trazamos la ruta, el camino que deberemos seguir para alcanzar nuestro punto de destino. La ruta trazada se desplaza a lo largo de carreteras y caminos trazados ya de antemano, rara vez vamos en línea recta a ningún sitio. El camino trazado está formado por distancias, direcciones en las que estas distancias deben ser recorridas, y puntos de referencia para efectuar cambios de dirección, por ejemplo, salir dirección norte, recorrer 3 kilómetros, llegar hasta el segundo cruce, girar a la derecha, tres kilómetros después, a la altura de dos semáforos girar a izquierda hasta un supermercado, girar a la derecha, etc. Obviamente vamos por las carreteras o caminos preparados para circular. Es exactamente lo mismo con tecnología programada. Cada vehículo tiene un mapa electrónico del recorrido que debe seguir. Con este mapa el vehículo puede planear la ruta de A hasta B. Las tareas imprescindibles que debemos realizar para trasladar de un punto a otro el vehículo son:
- – Conocer nuestra posición.
- – Escoger la ruta que debemos seguir para realizar el transporte solicitado.
- – Emplear un sistema de medición de desplazamiento y dirección para conocer la posición alcanzada.
- – Verificación de la posición obtenida con otro sistema independiente del procedimiento anterior.
- – Actuación sobre acelerador, freno y rueda directriz para seguir la trayectoria programada.
Sistema de filoguiado
Podemos construir un vehículo que circule por vías, con esto resolvemos el problema de la ruta, tendremos una instalación costosa, pero una maquina muy simple que seguramente no equivocará su camino, siguiendo los raíles construidos, de los que no puede salirse. Éste es un sistema muy rígido, cada cambio exige nuevas inversiones y paradas en el sistema productivo, está limitado en capacidad de vehículos, ya que hay que construir toda una red de raíles para hacer funcionar simultáneamente varios vehículos, con el inconveniente que existe si las rutas se cruzan. Resolvamos el problema de las vías simplificando su construcción, sustituyéndolas por un sistema fácil de instalar, como un cable conductor enterrado en el suelo en una hendidura de unos 6 mm de ancho y una profundidad entre 18 y 20 mm; este sistema de guiado o de conducción se llama ‘filo guiado’, sigue siendo un sistema de ‘camino fijo’, con sus ventajas e inconvenientes. La instalación de un hilo guía en el suelo es fácil, existen máquinas que cortan el suelo sin excesivo ruido ni polvo, y preparan una hendidura limpia y lista para la instalación de los cables. El cable conductor enterrado en el suelo, lleva corriente eléctrica a frecuencias predeterminadas, sirve de guía para el vehículo. Se usan diferentes frecuencias para definir caminos diferentes.
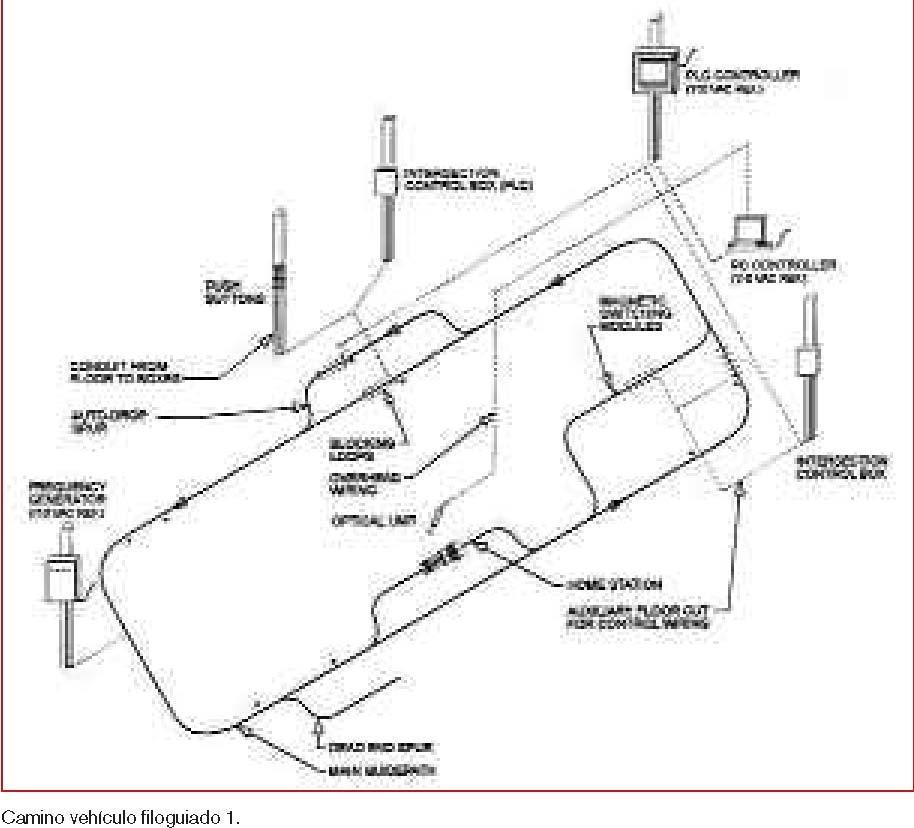
Hemos resuelto el problema de la ruta a seguir, nuestro vehículo está situado, en todo momento, en la ruta creada por el cable guía, sí, pero…, ¿en qué punto de la misma?, está en el punto 2, al lado del muelle de carga, o en el punto 4, frente a la máquina paletizadora; nada de lo mencionado hasta ahora nos permite conocer nuestra posición. Este sistema asegura que el vehículo se encuentra siguiendo la ruta que forma el cable con la frecuencia definida, pero debemos conocer en qué punto se encuentra para trasmitirle instrucciones, para esto podemos utilizar puntos conocidos, o ‘puntos base’. Los ‘puntos base’ pueden ser imanes incrustados en el suelo, reflectores para células fotoeléctricas, etc., incluso se puede aprovechar elementos de la arquitectura de la fábrica que sean inmóviles, para este fin. Ha habido trabajos usando sonar para descubrir esquinas o puertas, o pedazos de mobiliario que actúan como puntos de verificación, pero los ultrasonidos tienen problemas: la velocidad del sonido en el aire es proporcional a la raíz cuadrada de la temperatura absoluta, las texturas de las superficies también deben tenerse en cuenta, y las esquinas y ángulos de incidencia crean respuestas erróneas y difíciles de clasificar. Una vez conocido el lugar donde nos encontramos, la ruta la podemos definir enviando una frecuencia predefinida al cable conductor enterrado previamente en el suelo, y la instalación de puntos base a lo largo de la ruta nos permitirá mantener en todo momento a nuestro vehículo bajo control, conociendo con exactitud su posición cada vez que pase por ellos. Sólo nos resta dotar al vehículo con una antena guía, que le permita seguir el cable enterrado. Este dispositivo está basado en el campo electromagnético que crea una corriente alterna al circular por un conductor eléctrico. Este campo magnético es más intenso cerca del conductor eléctrico, y disminuye con la distancia a dicho conductor. Este campo electromagnético inducirá un voltaje al atravesar una bobina y puede determinarse su valor en los extremos de dicha bobina. El voltaje es proporcional a la fuerza del campo. Una antena inductiva contiene dos bobinas situadas a cada lado del cable guía enterrado en el suelo. La diferencia del voltaje eléctrico entre las dos bobinas determina, después de la amplificación, la dirección que debe seguir la rueda directriz. Cuando la antena se centra encima del hilo guía, el voltaje en los dos enrollamientos será el mismo y el ángulo de la rueda directriz es igual a cero. Si la antena se desplaza a un lado u otro del hilo guía, el voltaje aumentará en una bobina y se reducirá en la otra. Esta diferencia de voltaje generará una señal eléctrica que permite que el motor de dirección gire las ruedas directrices el ángulo deseado para situar el vehículo siempre encima del hilo guía. Ya tenemos creado un sistema capaz de automatizar la conducción de un vehículo.

Este sistema tiene tres ventajas:
- – Puede trabajar en ambientes sucios y polvorientos.
- – El sistema está libre de interferencias electromagnéticas, ya que sigue una frecuencia creada.
- – No tiene ninguna restricción, en cuanto puede usarse en cualquier tipo de ambiente, dentro y fuera de las instalaciones, puede atravesar túneles, etc.
Sus desventajas son:
- – Tiene bajo grado de flexibilidad, los caminos no pueden alterarse fácilmente, y es costosa la reparación cuando el cable se daña.
- – El costo de crear un nuevo camino para un vehículo filoguiado es más alto comparado con los sistemas no filoguiados.
- – No puede aplicarse cuando, en el suelo, tenemos tuberías y cables que serían dañados para montar nuestro ‘hilo guía’.
Si las rutas se definen bien y no necesitan ser cambiadas frecuentemente, el sistema filoguiado ofrece una conducción fiable a un costo relativamente bajo.
Sistema de guiado por láser
Pero podemos encontrarnos con situaciones donde se necesita que el vehículo no vaya sujeto a un camino fijo. Por ejemplo, si las rutas necesitan ser cambiadas frecuentemente, o los puntos de carga y descarga pueden variar de forma rápida para resolver problemas del sistema productivo. Éstas pueden ser algunas de las muchas razones por las que se prefiere eliminar por completo el ‘camino fijo’, bien sea las tradicionales y costosas vías, o el nuevo sistema de guiado por cable, esto nos obliga a dotar a los vehículos de un sistema capaz de seguir una ruta; a partir de ahora lo llamaremos ‘camino libre’, la ventaja de este concepto es que no rompe funcionamientos durante la instalación, las trayectorias son fáciles de cambiar, no hay ninguna limitación de capacidad, no tenemos elementos que dificultan el paso simultáneo de personas y vehículos convencionales, podemos utilizar todos los recursos de transporte a nuestro alcance. Los raíles, o los cables enterrados, en un vehículo de ‘camino libre’, son sustituidos por la tecnología de programación. El problema más importante que presenta este método es la determinación de la posición. Lo primero que tenemos que resolver es saber dónde estamos. Existen multitud de métodos para conocer la posición de un objeto en un plano. El primero que se nos puede ocurrir está basado en la odometría. La odometría es un método que puede calcular la posición de un objeto conociendo su punto de partida, midiendo la distancia recorrida y la dirección de la misma, realizando una sencilla suma de los vectores ‘distancia’ que hemos recorrido, desde el punto de partida, conocemos exactamente donde estamos. Esto funciona muy bien en el mundo ideal de nuestro cuaderno de cálculo, pero en el mundo real hay muchos imprevistos que hacen que este sistema no sea exacto, deslizamientos producidos por el agua, aceite, hielo, o cualquier otro producto, desviaciones producidas por irregularidades en la superficie, no previstas por ser eventuales, y el más grave de todos, el propio error cometido por los mecanismos encargados de medir las distancias y el ángulo de dirección en que estas distancias se recorren. Pero, a pesar de estos problemas, este método es sencillo, económico y fácil de poner en práctica. Fue desarrollado inicialmente para la navegación, y aún, hoy en día, se utiliza en algunos casos, se denomina ‘estimación’ de la posición. Si analizamos este método, en el caso de conducción de un vehículo, nos damos cuenta que nos obliga a partir siempre de un punto conocido, y una pérdida de la posición provocada por alguna de las circunstancias anteriormente mencionadas, nos obliga a reiniciar la ruta desde el punto de partida, ya que el vehículo no es capaz de saber si se ha equivocado o no, y esto obliga a situar un operario vigilando el desplazamiento del vehículo, cosa que está en contradicción con nuestro planteamiento. Esto es poco operativo en la mayoría de los ambientes industriales. Es obvio que necesitamos un método más ‘correcto’ y preciso para determinar la posición de nuestro vehículo.
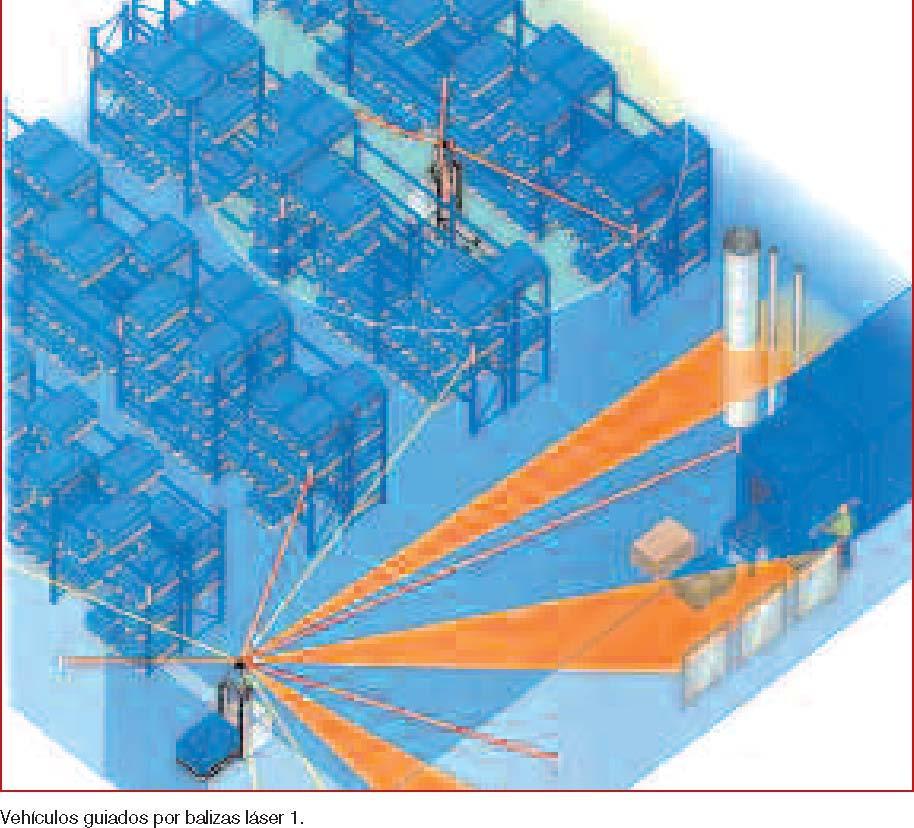
Se puede determinar la posición conociendo el ángulo que forma el punto donde nos encontramos con, por lo menos, tres puntos cuya situación es conocida. El sistema consiste en un dispositivo llamado baliza láser, se trata de un ingenio que determina la posición basándose en el ángulo que forma con tres puntos, cuya posición es conocida, llamados balizas de referencia. Con este dispositivo podemos, en todo momento, conocer nuestra posición, compararla con la ruta predefinida en nuestro software, y accionar los mandos de conducción para alcanzar nuestro destino. Para el control del vehículo se utiliza una combinación de ‘Estimación’, utilizando el sistema odométrico, y de ‘triangulación’, utilizando la baliza láser. Cada cierto número de pulsos, se verifica la posición mediante la baliza, y se corrige la dirección en función de los resultados obtenidos. Para trazar la ruta a seguir, se puede dibujar sobre un programa de dibujo, y si el software es lo suficientemente potente, se podrá trasmitir estos datos al vehículo para que siga la ruta fijada. Podemos simplificar el tema, creando una serie de puntos enlazados que formaran las rutas por las que se deberá trasladar nuestro vehículo. Este sistema, a pesar de su novedad y de la alta tecnología que emplea, no está exento de problemas:
- – Necesita siempre ver, por lo menos, tres de las balizas para determinar su posición. Esto hace que la baliza del vehículo y las balizas fijas situadas en las columnas, tengan que estar siempre despejadas, sin ningún elemento que interrumpa el rayo láser que sirve para determinar la posición. Puede ser un problema si se manejan cargas de alturas similares a las puertas que deben de atravesar, o si al nivel de las balizas hay mucho tráfico de vehículos o personas.
- – Al necesitar balizas, es imprescindible disponer de elementos donde éstas puedan situarse, como columnas o paredes. Cuando se pasa de una sala a otra, este posicionamiento desaparece, y durante estos trayectos, el vehículo funciona ‘ciego’, hasta que vuelve de nuevo a ‘ver’ sus balizas de posicionamiento.
- – Es difícil atravesar túneles.
- – El software puede llegar a ser muy complejo, y para su mantenimiento y cambios necesitar ser atendido por expertos. Un punto importante a tener en cuenta es el grado de formación que disponen los técnicos de la planta.
Comparativa de los sistemas: filoguiado y láser guiado
Resumiendo, con estos dos sistemas, tenemos ya una idea clara como podemos automatizar la conducción de nuestros vehículos autónomos. No es mejor uno que otro, sólo son soluciones diferentes para abordar problemas concretos, no por gastar más dinero vamos a obtener mejores soluciones. Además, la capacidad de los actuales PLC’s da opción a que, en una misma máquina, después de analizar en profundidad las rutas y las necesidades del cliente, podemos tener dos, tres o más métodos de guiado y posicionamiento, pudiendo, de esta forma, escoger el que más se nos acomode, y dé mejores resultados en cada momento.
Costo de la inversión
Analicemos ahora el coste de la inversión. Los siguientes ejemplos ilustran el ROI esperado para cada uno de los vehículos citados. Asumimos dos turnos de trabajo por día (16 h de trabajo cada 24 h), cinco días por semana y 50 semanas por año. El costo del salario del operador de la transpaleta o apilador se calcula en 3.000.000 pts/año para este ejemplo. Asumimos que el costo del mantenimiento anual es similar para un vehículo convencional o para un AGV.
ROI = El tiempo que tarda una inversión de AGV para pagarse por sí mismo calculando el costo de un sistema de AGV dividido por el costo anual de funcionamiento de un vehículo convencional, transpaleta o apilador, que debe incluir un conductor por máquina.
Un vehículo transpaleta puede compensar el trabajo de 2 conductores, para un puesto de trabajo de dos turnos, el precio de los componentes para su automatización puede oscilar entre los 58.000.000 pesetas:
8.000.000 pts. ÷ (2 turnos × 1 operario × 3.000.000 pts/año) = ROI en 1,3 años.
Características vehículo:
- – Capacidad de carga 2.000 kilogramos.
- – Fácil cambio en funcionamiento automático o manual
- – Posibilidad de automatizar máquinas de su propiedad, no es necesaria la adquisición de un equipo completo, sólo automatizarlo.
Un vehículo de transporte totalmente automatizado puede compensar el trabajo de 2 conductores por turno, el precio de los componentes para su automatización puede oscilar entre los 1215.000.000 pesetas, sin considerar implementos específicos ni elevación de carga:
15.000.000 pts. ÷ (2 turnos × 2 operarios × 3.000.000 pts/año) = ROI en 1,25 años.
Características del vehículo:
- – Distribución motrizdirectriz en forma de triciclo, o sistema bidireccional, 4 caminos, trasladando la carga hacia cualquier lado.
- – Capacidad de carga hasta 4.000 k.
- – Posibilidad de implementarlo con sistemas especiales de rodillo, cadenas, u otros para conseguir mejores eficiencias en el trabajo de transporte asignado.
- – Vehículo muy compacto con respecto al tamaño de carga.
En poco más de un año, una inversión de este tipo queda amortizada, sólo considerando el coste del conductor. Si a esto añadimos la valoración de las ventajas mencionadas al principio de este artículo, llegamos a la conclusión de que es una inversión interesante para la mayoría de las empresas que necesiten trasladar muchas mercancías dentro de su sistema productivo.
Nota
Para mas información sobre metodología, sistemas y tipos de agv, pueden visitar: http://agvferre.eresmas.com/index.htm, donde espero que puedan encontrar respuesta a muchas de las dudas sobre este tipo de soluciones. El autor se ofrece a dar todas las aclaraciones sobre el texto. Para ello pueden ponerse en contacto con él a través de su email, ferre@itcom.
Bibliografía
- Artículo Técnica Industrial nº 238: Uso de herramientas estadísticas en estudios de siniestralidad laboral, por Salvador Pérez García.
- The book of ideas, por NDC an SICK.
- The personal robot navigator, por Merl K. Miller, Nelson Winkless, Joe Bosworth.
Internet
- http://www.agvp.com
- http://www.amerden.com
- http://www.mitr.com/index.html