

Regulación del tráfico en cruces mediante reparto de los derechos de paso
Frente a la tradicional regulación de los semáforos con un esquema de tiempo fijo, los autores proponen un algoritmo para regular el tráfico en función de la demanda
La bondad de la regulación del tráfico y del transporte determina la calidad del servicio. El nivel de vida de una comunidad está asociado a la calidad del método de transporte usado. Mientras para las comunidades pequeñas podría considerarse una cuestión de segundo orden; sin embargo, cuando el volumen de unidades de transporte crece, es inevitable adoptar reglas que limiten los posibles comportamientos de los móviles. Se establecen principios y derechos de paso, buscando un mayor aprovechamiento de los recursos disponibles. Una alta calidad de los métodos de transporte al alcance del ciudadano supone mayor satisfacción para el conjunto de usuarios y una mejora del nivel de vida de la comunidad. La calidad de los diferentes métodos de transporte podemos evaluarla en función de varios conceptos: tiempo utilizado, coste, seguridad y comodidad. Mediante la regulación de derechos de paso en un cruce se busca disminuir la tasa de accidentes de la intersección, restringiendo al mínimo las molestias ocasionadas por la regulación. Un método de transporte muy utilizado en el mundo civilizado es el automóvil. A consecuencia de ello, deben plantearse reglas para una correcta aplicación de sus posibilidades. El reglamento establecido debe especificar una jerarquía para los derechos de paso. Dicha jerarquía se verá reflejada en las vías de tráfico de forma simple: policías, postes, semáforos, vallas, señales estáticas y/o luminosas… Los criterios utilizados para indicar la preferencia de paso dependerán, básicamente, de dos factores:
1) Volumen: vehículos (passengers car equivalent – P.C.E.) que circulen por las vías conflictivas. Si el volumen es bajo, basta utilizar una señal vertical.
2) Seguridad: cuando las características del cruce lo indiquen. Por ejemplo: una vía rápida que atraviese un núcleo urbano deberá tener semáforos que permita a los peatones cruzar la vía sin riesgo.
El semáforo
El semáforo se incorporó a la regulación de tráfico a finales del s. XIX. Un semáforo es una herramienta que asigna derecho de paso a los coches que quieran realizar un movimiento. Un conjunto de semáforos regulará las posibilidades de paso para cualquier intersección, controlando el riesgo de conflicto entre movimientos incompatibles. El semáforo utiliza cuatro tipos de señales para codificar la secuencia de paso:
1) Señal continua verde: indica que se tiene preferencia absoluta de paso.
2) Señal continua rojo: indica que se tiene prohibición absoluta de paso1.
3) Señal continua ámbar: indica que estamos en un intervalo de transición, entre las señal verde y la roja. Indica a los usuarios la inminencia de la señal de prohibición de paso, evitando una transición brusca a la restricción del paso.
4) Señal intermitente ámbar: indica precaución. Puede ser por circunstancias anómalas al tráfico (un temporal, una manifestación…) o por causas inherentes a la regulación deseada. Concede derecho restringido de paso.
El semáforo podemos clasificarlo según el tipo de regulación que use. Se establecen tres categorías, dependiendo de la reiteración de la secuencia que gobierna la intersección:
La regulación fija será aquella en la que el reparto de tiempos y de derechos de paso sea periódico en el tiempo, repitiéndose indefinidamente, sin solución de continuidad.
La regulación variable se caracterizará por tener siempre la misma secuencia en el reparto de los derechos de paso, pudiendo variar la duración del intervalo de cada derecho, llegando incluso a anularse si no hubiera demanda.
La regulación acíclica será aquella en la que no se pueda predecir el comportamiento futuro del semáforo a partir de sus valores históricos. Se corresponde con aquellos semáforos en los que se establecen derechos de paso y duración de los mismos a partir de la demanda de cada movimiento.
El cruce aislado
El cruce aislado es el elemento básico de regulación del tráfico. Un cruce aislado queda definido por al menos dos vías que intersectan en el mismo nivel. Un cruce típico, al que nos referiremos por omisión, será un cruce en cruz de dos vías sin restricciones al movimiento. Para la caracterización correcta de un cruce, y su posterior estudio, es necesario conocer los valores de algunas variables. Clasificaremos las variables en tres grupos según su causa. Las que sean intrínsecas a la intersección, variables geométricas; aquellas que estén asociadas al flujo que atraviesa el cruce, variables de flujo; y las que resulten de la regulación establecida para ese cruce, variables secuenciales.
Variables del sistema
A continuación se definirán una serie de variables que se consideran imprescindibles para la comprensión de las ecuaciones que definen las diferentes soluciones del problema planteado.
Variables intrínsecas o geométricas
Son variables geométricas todas aquellas que quedan definidas independientemente del uso que se haga del cruce, tanto de la demanda de usuarios y del tipo de demanda, como de la solución adoptada para dar solución al reparto y dar salida a los usuarios.
Calle
Es la zona de la red urbana por donde pueden desplazarse diferentes móviles.
Acceso
Es toda posible fuente de vehículos que atraviesen un cruce.
Movimiento
Cada una de las posibles trayectorias de un vehículo, de forma que se atraviese el cruce, conforma un movimiento. El número de posibles movimientos, sin ninguna restricción inicial, será igual a n(n-1), siendo n el número de accesos que confluyen en el cruce.
Carril
Es cada una de las divisiones hechas en el acceso, de forma que cada uno de los carriles puede dar servicio sólo para una hilera de coches. Un carril sólo puede tener asociada una dirección en cada instante, aunque ésta puede variar en el tiempo.
La anchura del carril ( f? ) será un factor que pondere el número de vehículos medidos.
El número de carriles ( N ) asociado a cada movimiento determinará, junto a la tasa ideal de saturación, una cota al volumen de vehículos que puede atravesar el cruce, sin alcanzar condiciones de saturación.

Paso de cebra
La existencia de pasos de peatones, puede modelarse como un movimiento añadido por acceso, de forma que el peatón tenga preferencia absoluta. Introduce una restricción más a satisfacer en la regulación del cruce. En general, una fase en la que se de tiempo para cruzar un paso de peatones, nunca concede menos de 5 s de derecho de paso exclusivo del peatón.
Tasa ideal de saturación (s0)
Número medio de coches por unidad de tiempo que circularían por el acceso, supuesto que tienen derecho continuo de paso, y que la demanda de vehículos es permanente. Un valor generalmente admitido ha sido de 1800 veh/h, para cada carril.
Tiempo perdido de ciclo
El tiempo perdido de ciclo representa la parte del ciclo que no es útil para ningún movimiento. No tiene existencia real, y es una entidad introducida para modelar el tiempo desaprovechado para modificar la señal de reparto de prioridades, manteniendo intervalos de seguridad. Es directamente proporcional al número de fases de la regulación elegida para ese ciclo, toma un valor medio de 3s/fase y debe incluir el tiempo de despeje, que es el tiempo necesario para que la intersección quede vacía, de forma que todo lo que ha entrado en el cruce pueda salir. El tiempo de despeje para el conjunto del cruce, coincide con el tiempo conjunto de rojo, que es el período de tiempo, para cada ciclo, en que todos los movimientos de intersección tienen prohibido el paso.
Aparcamientos/Paradas de autobús
Debe establecerse la existencia de aparcamientos y/o paradas de autobuses en las inmediaciones del cruce, de forma que deberá determinarse si a efectos prácticos las proximidades del cruce son utilizadas para estacionar vehículos, aunque esté prohibido por la señalización.
Longitud máxima de cola
Dado el carácter discontinuo del servicio de un semáforo, y puesto que mientras el movimiento está prohibido siguen llegando coches, se forma una cola en espera de ser servidos tras el semáforo. Esa cola dependerá de la demanda del movimiento y de la frecuencia del servicio. La cola no debe nunca ser mayor que la capacidad de almacenamiento de ese movimiento. Un eventual desbordamiento de una cola podría obstruir los movimientos de los semáforos precedentes, propagándose al resto de la red las condiciones de saturación, desbordamiento y desorden.
Saturación del cruce
El volumen máximo de coches que pueden atravesar un cruce vendrá limitado, inicialmente, por las características geométricas del cruce, estableciéndose una cota para el flujo absorbible. Esta cota superior se verá aún disminuida por el reparto de tiempos que se establezca, como se discutirá en el apartado de variables de la secuenciación.
Variables de flujo
Se considerarán variables de flujo todas aquellas variables necesarias para definir un cruce, que dependan directamente de la demanda de los usuarios y de su comportamiento.
Velocidad media
La capacidad de las intersecciones para satisfacer un flujo depende de la velocidad del coche para atravesarla. Aunque la velocidad media puede variar de unas regiones a otras, e incluso entre diferentes barrios de una misma ciudad, se acepta como tasa media de servicio el valor de 0.5 veh/s.
Intervalo de medidas
El volumen de tráfico que atraviesa cualquier punto de la ciudad depende en gran medida del instante considerado. No obstante, pueden realizarse predicciones de valores futuros a partir de datos históricos. Para ello se introducirán factores de dependencia, que pueden modificar la predicción, a igualdad de valores de resto:
• Hora del día en que se realiza la medición. Los valores obtenidos en horas punta pueden ser del orden de 20 veces los obtenidos en las horas valle.
• Carácter festivo o laborable del día. Los días festivos el volumen puede descender en las horas punta hasta la mitad, y aumentan las medidas de los valles, suavizándose la curva de flujo-tiempo.
• Época del año.
Además de estas variables genéricas, hay otras variables acíclicas, que pueden invalidar las medidas. Sería el caso de un día lluvioso en una zona de escasa lluvia. No podría incluirse esas medidas para la obtención de flujos medios con que regular el tráfico. Otro caso que invalidaría las medidas para hacer previsiones serían los sucesos extraordinarios de la ciudad (congresos, fiestas, espectáculos…).
Volumen ( q )
Es el volumen equivalente de vehículos (P.C.E.) que desea atravesar una intersección, para cada movimiento permitido. Para la medición de los vehículos que circulan por un carril, existen varios métodos. El más utilizado es una espiral en la calzada que crea un campo magnético y que detecta la variación de las líneas de flujo asociadas al paso de un vehículo. Dicha medida se regulará de forma que no se contabilicen los peatones. Su inconveniente principal es la incapacidad para distinguir el tipo de móvil que contabiliza. Además, si la variación es pequeña (moto que circula entre dos carriles), puede no detectarse.
Mínimo tiempo verde
Conocido el volumen que desea realizar un movimiento, resultará una restricción a satisfacer diferente para cada posible movimiento considerado.
La regulación que se elija, independientemente de la combinación de derechos de paso que utilice y del reparto de tiempos de haga, tendrá que dar a ese movimiento un tiempo mínimo tal que todos los coches puedan ser servidos.
Esta restricción es similar, pero no idéntica a la que resultaba del flujo de peatones, y existirá una restricción por cada tipo de movimiento deseado. La diferencia estriba en que el verde de peatón depende del flujo de peatones y de la distancia a recorrer, pero en ningún caso toma un valor inferior a la cota establecida, normalmente 5 s. El verde de un automóvil no tiene acotado el tiempo mínimo que recibirá en el reparto. Puede incluso anularse, entendiendo por ello que el volumen de vehículos es tan bajo que puede atravesar el cruce durante el intervalo de despeje del cruce.
Flujo relativo ( y )
Se define el flujo relativo de cada movimiento como el cociente entre el flujo de vehículos que realizan el movimiento y la tasa de saturación real del cruce. Es menor que 1.0.
Variables secuenciales
Son variables secuenciales aquellas que especifican mediante qué reparto de tiempos y mediante qué asignación de derechos de paso se satisface la demanda, buscando optimizar el uso de los recursos geométricos existentes frente al flujo estudiado. El reparto propuesto lo denominaremos secuencia solución.
Verde real o físico ( G )
Se denomina verde real o verde físico al tiempo en que el movimiento recibe una señal de verde, o derecho absoluto de paso, del semáforo.
Rojo real o físico ( R )
Se denomina rojo real o físico al tiempo en que el movimiento recibe una señal de rojo, o prohibición absoluta de paso del semáforo.
Ámbar ( A )
Se denomina ámbar al tiempo en que un movimiento recibe una señal de amarillo, ya sea precaución, ya sea derecho restringido de paso, por parte del semáforo. Si la señal es de precaución o de tránsito entre verde y rojo, la duración característica es de 3 s.
Ciclo ( C )
Periodo de repetición de la secuencia. Cada ciclo repite la concesión de derechos de paso a los movimientos, así como la duración de los mismos. El ciclo de cada semáforo debe ser el mismo para todos los semáforos relacionados entre sí. Se busca coordinar los semáforos (onda verde).
Por razones tecnológicas, tradicionalmente la duración del ciclo ha sido un múltiplo de 5. El valor más frecuente es de 90 s, y los límites de oscilación suelen estar entre 60 s y 120 s. El tiempo de ciclo es la suma del tiempo de las señales: G A R C
Tiempo verde efectivo ( g )
Se denomina tiempo verde efectivo al tiempo equivalente en el que atraviesan la intersección con una tasa s y sin tiempos de reacción el mismo número de vehículos que con tiempos G, A y tiempos de reacción.
Tiempo rojo efectivo ( r )
Se denomina tiempo rojo efectivo a la diferencia entre el tiempo verde efectivo y el tiempo de ciclo.
Tiempo de reacción ( lij )
Es el tiempo perdido debido a la reacción del conductor ante la variación de la señal que recibe. Tiene dos términos, principalmente: el tránsito de rojo a verde y el paso de verde a rojo. Es un término que suele valer en total 3 s en los movimientos hacia el frente y 1 s en los giros.
Tiempo de verde relativo ( ? )
Es el cociente entre el verde efectivo y el tiempo de ciclo
Saturación ( )
Es el cociente entre el flujo relativo y el tiempo de verde relativo. Su valor es igual al número de coches que desean ser servidos dividido por el número de coches que pueden ser servidos. Si su valor es menor de 0.65, el retraso que introduce la regulación del cruce es muy pequeño. Un valor pequeño de X, para el conjunto del cruce, no implica que no se produzcan retrasos, pues puede suceder que algún movimiento sí tenga un valor alto de X debido al escaso verde que tiene.
Matriz de incompatibilidades
La matriz de incompatibilidades es una matriz binaria que representa mediante el elemento (i,j) si el movimiento i es compatible con el j. En ese caso el elemento será la unidad. Si los dos movimientos son incompatibles el elemento es nulo.
Grupo
Un grupo es un conjunto de movimientos tal que todos sus componentes reciben siempre al mismo tiempo derecho y prohibición de paso. La secuencia que regula el paso de todos los vehículos que quieran realizar algún movimiento de un grupo es la misma.
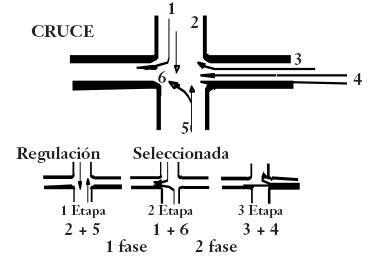
Fase/Etapa
Es el tiempo de ciclo durante el cual la señal de regulación no varía2.
En el siguiente gráfico se observa la regulación de un semáforo con dos fases y tres etapas. Los accesos N-S reciben derecho de paso durante la primera fase. En la primera etapa tienen verde los movimientos 2 y 5, y en la segunda 1 y
6. Cuando los accesos N-S ya no reciben más tiempo de paso, empieza la segunda fase, que coincide con la tercera etapa.
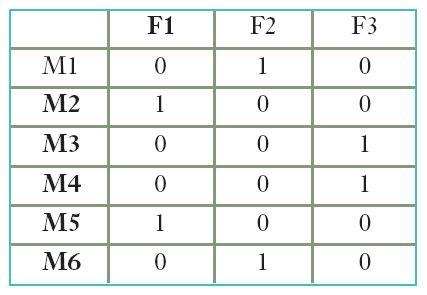
Matriz de secuencias
La matriz de secuencias representa los movimientos por filas y las etapas por columnas. Está compuesta por 0 o 1, de forma que un 1 en la posición (i,j) indica que el movimiento j tiene derecho de paso en la etapa i. La matriz de secuencias no indica la duración de cada una de las etapas.
La matriz de secuencias de la solución elegida sería:
Tiempo de espera
El tiempo de espera es el tiempo medio
que se lleva un vehículo en cola esperando
ser servido. Una vez satisfechas las
restricciones de seguridad y de que todas
las unidades que lleguen sean servidas,
se utiliza el tiempo de espera como criterio
para medir la calidad del servicio
que ofrece el cruce.
Movimiento crítico
Los movimientos de un cruce son servidos
conjuntamente, en grupos. Se llama
movimiento crítico al movimiento que
impone una mayor restricción al reparto
de tiempos. Será el movimiento que
necesite más tiempo para satisfacer su
demanda. El conjunto de movimientos
críticos de cada grupo de movimientos
determinará el reparto de tiempos
que se realice de ciclo. Si no se pueden
satisfacer todos los movimientos críticos,
el cruce está saturado.
Generalmente, una vez satisfechos todos
los movimientos críticos, la holgura del
tiempo de ciclo restante se reparte con
algún criterio de proporcionalidad, buscando
que el retraso medio sea menor.
Puede realizarse otro reparto de la holgura,
pues ya se ha garantizado el servicio, aunque
ello sería a costa de la calidad del servicio.
Existen otros criterios, tales como el
número de paradas que realiza un coche
durante su recorrido, el consumo de combustible
realizado, la emisión de contaminantes,
la capacidad de servicio del cruce
o la eliminación máxima de los accidentes
en la red.
Algoritmos del reparto
Hasta ahora hemos expuesto una dificultad
de la regulación del tráfico, el trabajo
a tiempo real. Salvando la problemática
asociada a la toma de datos, resulta
que la resolución del problema de asignación
de tiempos es muy lenta. En este
artículo se expondrán varios algoritmos
de reparto de tiempos del ciclo, que permiten
trabajar en condiciones de tiempo
real. El tiempo necesario para encontrar
la solución mediante el algoritmo es muy
bajo, permitiendo funcionar de forma
operativa en condiciones de tiempo real.
Debe especificarse que la solución
propuesta por los algoritmos no necesariamente
es la óptima, pero es una aproximación
buena. La bondad de esta
aproximación se ha analizado sobre baterías
de datos, obteniéndose resultados
aceptables. También se ha realizado la
implementación informática de los algoritmos,
que se comenta al final del presente
artículo.
Algoritmo de flujo libre
El retraso medio de los vehículos en un
cruce se compone de dos sumandos, referidos
al término estacionario y al término
aleatorio del retraso. El término estacionario
del retraso está asociado a la espera
del vehículo con luz verde, debido a que se
está vaciando la cola de coches que le
preceden en el semáforo. El término aleatorio
del retraso está asociado a la espera
del vehículo debido a que pierde ciclo. La
cola que lo precedía no se ha vaciado, y
tiene que esperar un nuevo derecho de
paso, con lo que pierde un ciclo.
La importancia relativa de ambos
sumandos depende del grado de congestión
del cruce. Si el grado de congestión
es bajo, la capacidad de dar servicio del
cruce es mucho mayor que la demanda
de vehículos. Todos los vehículos son servidos
en el primer tiempo de verde que
reciben, sin sufrir nunca pérdida de ciclo.
En este caso, el término aleatorio de la
expresión del retraso es despreciable, y
el término estacionario es una buena
aproximación del retraso total. Esta situación
se denomina condiciones de flujo
libre.
El algoritmo que se expone a continuación
sirve para el reparto de tiempos
de ciclo en condiciones de flujo libre, con
una segunda hipótesis: la matriz de derechos
de paso debe ser diagonal. Esto es
equivalente a que las fases sean estrictamente
disjuntas.
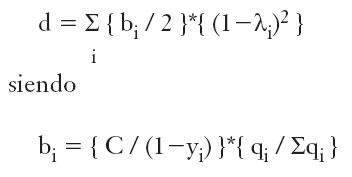
La expresión del retraso, para cada
movimiento, en condiciones de flujo
libre, queda:

donde se observa que el primer factor de
di es función de las variables de flujo, y
el segundo sólo depende de las variables
secuenciales. El primer factor es un dato
exterior al cruce independiente del
problema de reparto del tiempo de ciclo.
También el ciclo es un dato conocido,
salvo que el cruce sea independiente de
la red más cercana. El retraso depende
del tiempo de ciclo, pero su dependencia
respecto del reparto hecho del tiempo
de ciclo es mayor. Si el tiempo de ciclo
aumenta, pero el verde del movimiento
i se mantiene constante, su retraso es
mayor.
El retraso medio total es la suma ponderada
de los retrasos de cada movimiento:
análogamente, definiendo bi referido al conjunto del cruce, se pueden calcular el retraso total y la tasa de retraso del cruce. Para ello se definirían, respectivamente:

El problema se reescribe en esos términos como:
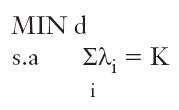
donde K es el tiempo de ciclo asignable al paso del tráfico de vehículos por los diversos accesos, expresado en ciclos. En cuanto al conjunto de condiciones, ?i=0, se cumplirá por la hipótesis de cálculo. Dado que el flujo es libre, debe cumplirse que X << 1. Por lo tanto, para cada movimiento tendremos ?i >> qi/si, con lo que los tiempos de verde relativos ?i serán positivos.
Veamos ahora cuales son las consecuencias de la hipótesis de flujo libre, y la restricción que impondrá en la aplicación del algoritmo del reparto: al ser la matriz de paso, los movimientos sólo pueden ser servidos en una fase, y los valores de ?i estarán definidos, en cada fase, por el movimiento de mayor flujo relativo de coches (siendo yi el flujo relativo). La hipótesis de fases disjuntas per-mite asociar cada fase con el movimiento más crítico.
Si relacionamos el tiempo de verde relativo y el flujo relativo de vehículos se tiene:

donde sólo se han considerado los n movimientos que condicionan el valor de ?i, de los m movimientos totales.
Resulta que la condición necesaria y suficiente de compatibilidad queda:

donde ß= min ( 1/Xi ). Por tanto, en términos generales, son aceptables para la aproximación de flujo libre valores de ß mayores de (1/0.65), pues Xi = 0.65 es la máxima tasa de saturación de todos los movimientos para suponer despreciable el retraso estacionario.
La solución al problema será el vector (?0,?1…?m), donde ?0 es la fracción de ciclo no hábil para el reparto.
Aplicación del algoritmo de reparto de flujo libre
El algoritmo del reparto necesita dos hipótesis, flujo libre y fases disjuntas, y obtiene valores para ?i admisibles. La solución propuesta por el algoritmo cumplirá todas las restricciones, e indicará el óptimo de la función objetivo considerada.
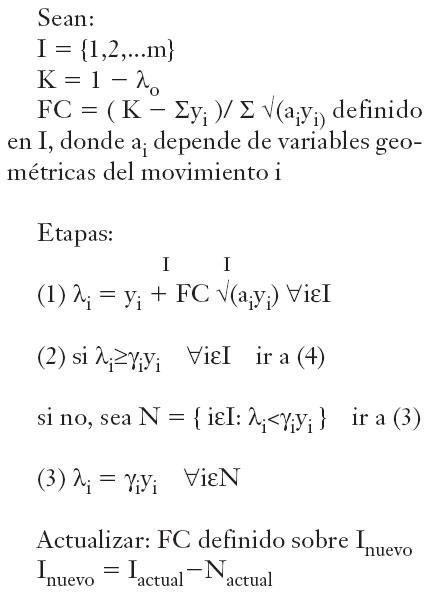
Sean:
I {1, 2,…,m}, conjunto de fases no asignadas
K 1 ?o, tiempo hábil de ciclo
Card(I) m, número de fases no asignadas
?definido sobre I (su valor es la suma de los inversos los valores bi sobre las fases no asignadas)
Etapas:

Análisis de resultado
Este algoritmo proporciona un método de cálculo de la solución rápido y sencillo. No obstante, hay que recordar que las restricciones que impone este algoritmo son muy fuertes, por lo que no puede aplicarse en el análisis de un caso genérico.
Si bien la condición de que las fases sean disjuntas se cumple con una frecuencia alta en los cruces estudiados, la necesidad de flujo libre autoexcluye este método de regulación para una regulación fija. Si la regulación del semáforo es variable, podría utilizarse el algoritmo para el periodo fuera de las horas punta del tráfico.
Los resultados reales del algoritmo, además, deben dar un retraso inferior al valor teórico. En el reparto de tiempos sólo se ha considerado el movimiento crítico de todos los que están regulados por el mismo grupo de semáforos. Es razonable pensar que en un caso real no todos los movimientos de todos los grupos sean críticos. Todos los movimientos no críticos tendrán una mayor holgura de tiempo de servicio mayor que la del crítico, al ser el volumen de vehículos menor. Por lo tanto, el retraso asociado a los movimientos no críticos será menor que el del movimiento crítico, y el retraso medio real será menor que el teórico. El resultado teórico supuso que todos los movimientos son críticos.
El algoritmo puede extenderse al caso en que los tiempos de verde del semáforo están ya acotados inferiormente. Para ello, se modificará la cota de Îi, para los pasos (2) y (3) del algoritmo, en la forma:

ßyi =max{ ßyi, gmínimoi } ?i
Flujo congestionado
Se denomina flujo congestionado a la situación en la que el término aleatorio del retraso no es despreciable frente al estacionario. En el flujo congestionado, los vehículos experimentan retraso debido a la pérdida de ciclo. Los tiempos de verde asignados a cada movimiento no sólo han de servir la demanda de vehículos existente, también han de cumplir las acotaciones inferiores impuestas.
El método aplicado en el algoritmo es muy simple. Consiste en asignar inicialmente los tiempos ignorando las restricciones exteriores del reparto. Si algún tiempo asignado no satisface su acotación inferior, se aumenta hasta el valor mínimo admisible que establece la cota, y se minora el tiempo hábil de ciclo para repartir en los valores impuestos. El proceso se repite hasta que todos los tiempos son admisibles.
Sean:
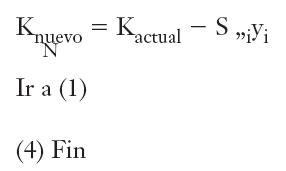
El resultado obtenido es válido para cualquier movimiento. Con este reparto, se asigna a cada movimiento i el mínimo necesario yi, repartiéndose el tiempo restante entre los movimientos según la característica del tráfico de cada movimiento vaiyi.
Tan sólo se han introducido dos restricciones, que son que la tasa de congestión del movimiento i sea menor que 1 y que K>Syi.
FC, factor de congestión, disminuye al aumentar el grado de congestión del cruce, anulándose para situaciones de congestión plena, Xi1 “i. FC aparece como un factor de corrección de la expresión de Webster, para la relación de los tiempos de verde de los movimientos:

cuanto menor sea FC, mayor será la congestión existente en el cruce, y la relación de repartos de tiempos de verde relativos se parecerá más a la de Webster.
Implementación de los algoritmos
Flujo libre
Tomando como función objetivo del problema de reparto de tiempos minimizar la espera media de cada vehículo, se aplica el algoritmo de cálculo que proporciona el reparto óptimo. Se busca salvar la dificultad del trabajo en tiempo real. Esta solución, sin embargo, no es general, e impone una fuerte restricción, pues desprecia el término de retraso aleatorio de la fórmula del retraso. Eso sólo es posible en el caso de que la tasa de saturación del cruce sea menor que 0.65.
La capacidad de la vía estudiada debe ser del orden de dos veces el flujo de vehículos en el momento de la aplicación. Esta condición conlleva que no pueda aplicarse más que en determinadas horas del día. El algoritmo sólo puede trabajar con una distribución disjunta de los derechos de paso. No se contempla el caso de movimientos que reciban derecho de paso en más de una fase por ciclo. Para la realización del pro-grama se ha supuesto que el tiempo per-dido en cada fase es de 3 segundos y el ciclo teórico de 90 segundos. La tasa de saturación del cruce es de 0.5 veh/s, y los movimientos críticos son monocarriles.
Los datos introducidos al programa en cada aplicación son: número de fases que hay en la regulación y volumen equivalente de coches del movimiento crítico para cada fase.
El volumen suministrado será el volumen equivalente de coches dominante de una fase, esto es, aquel volumen que se acerque más a la capacidad de servicio de ese movimiento. Corresponde al movimiento cuyo volumen está más próximo a la tasa total de saturación. Esa proximidad se medirá en cantidades relativas, en porcentajes, no absolutas. La aplicación desarrollada no necesita los datos del resto de movimientos de cada grupo.
El programa proporcionará una matriz de resultados con el reparto de tiempos. Los tiempos que suministrará corresponden a criterios de verde efectivo, no verde real. Habrá que obtener el verde real detrayendo del efectivo el valor del ámbar, de duración media 3 segundos. Además de proporcionar el verde asociado a cada movimiento según el algoritmo, el pro-grama proporciona el retraso medio que resultará de esa solución. El valor porcentual de los derechos de paso está referido al tiempo de ciclo real.
El número de iteracciones efectuadas, en los casos comprobados, ha sido de una media de dos, llegándose raramente a las tres iteracciones. Nunca se ha necesitado de cuatro iteracciones.
El proceso de búsqueda de la mejor solución se hará para tres funciones objetivos diferentes, que son: el retraso medio de cada vehículo, el retraso total del conjunto de vehículos y la tasa de retraso del cruce. El retraso total será igual al retraso medio por el número de vehículos, y la tasa de retraso será el producto del retraso medio por el flujo de vehículos por segundo.
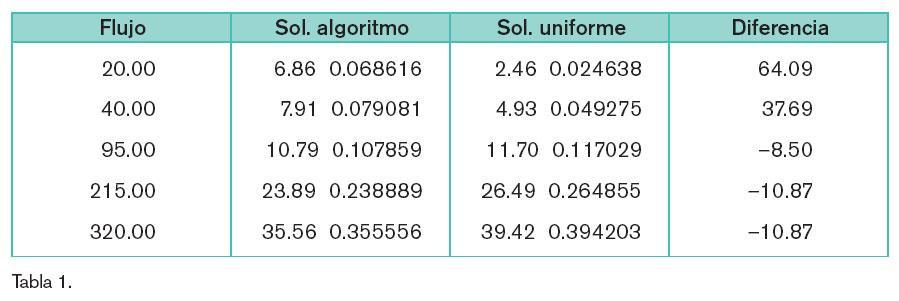
Analizando un cruce con una regulación de cinco movimientos críticos, con unos flujos de vehículos asociados de (20, 40, 95, 215, 320), un extracto de la salida de la aplicación, tomando como función objetivo el retraso medio, nos ofrecería:
sólo se resuelven movimientos con verde en una sola etapa/fase.
Dame el número de fases/movimientos (máximo 15): 5.
Dame los flujos de cada movimiento (veh/h): 20 40 95 215 320.
FUNCIÓN: Minimizar el retraso medio.
algot: 159.28 un: 160.21 (tabla 1)
Los valores del reparto de tiempos de la solución uniforme serán iguales, independientemente de la función objetivo utilizada, mientras que con el algoritmo obtendremos un reparto diferente según usemos el retraso medio, o las otras dos, cuyas soluciones coinciden entre sí. Se especifica en cada con-junto de soluciones cuál es la función utilizada, y qué valor se alcanza en la función objetivo.
El retraso obtenido utilizando el reparto del algoritmo es, en general, mejor que el que resulta usando la solución uniforme.
Flujo congestionado
Este programa aplica el algoritmo de flujo congestionado al reparto de tiempos de ciclo de un cruce. La tasa total de saturación del cruce debe ser menor que uno. Si es menor de 0.65, se puede usar también el resultado del algoritmo de flujo libre. El tiempo de ciclo nominal que usa el pro-grama es de 90 segundos, la tasa de saturación de 1800 veh/h, la constante ai de la función de retraso vale 1.0, el tiempo perdido de ciclo vale 3 segundos, igual que el tiempo perdido por cambio de fase. El número máximo de fases es de 10.
Se han impuesto acotaciones inferiores en todos los movimientos, con un valor por omisión de ? 1.51 constante e igual para todos. Este valor de ?, es la máxima restricción compatible con condiciones de flujo congestionado. Si los datos corresponden a un flujo congestionado, X > 1, no se aplica el algoritmo. Si es un flujo libre, se aplica el algoritmo de flujo congestionado. Los resultados, al usar un conjunto de restricciones diferentes, son diferentes al del algoritmo de flujo libre.
La aplicación señala los movimientos en los que se ha impuesto el tiempo de verde, y el número de iteracciones efectuadas. La solución aparece expresada tanto en porcentaje del ciclo como en tiempo real. El valor del tiempo de paso concedido a cada movimiento se descompone en la suma de dos términos, en el caso de que no se imponga la cota inferior como solución. Esos dos sumandos corresponden a los términos de la expresión (1) del algoritmo. El primer término indica cuál es el valor mínimo del verde que necesita ese movimiento para dar servicio a todos los vehículos. El segundo término indica cómo se ha efectuado el reparto del tiempo de ciclo sobrante, una vez asignados los mínimos estrictamente necesarios. Si la suma de ambos términos no es suficiente para satisfacer además la cota inferior, el tiempo de verde se impondrá.
El cruce considerado tiene una regulación de cinco fases, con unos volúmenes de vehículos en los movimientos críticos de (40, 50, 60, 300, 500). El valor de ? considerado en este caso es 1.2, flujo congestionado.
¿Cuántas fases tiene el movimiento a estudiar? 5.
Dame los flujos dominantes para cada acceso (5): 40 50 60 300 500.
Resultados (tabla 2):
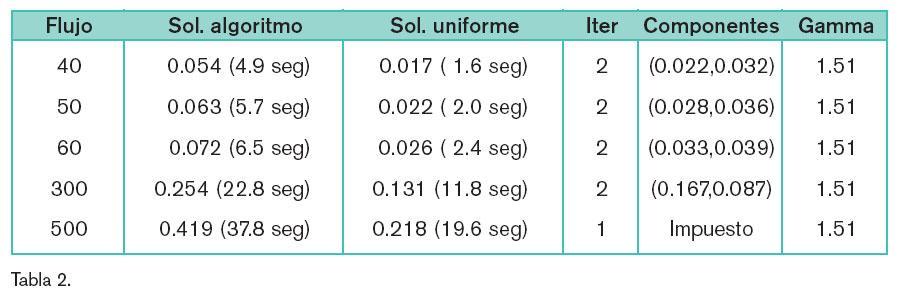
Se ha analizado también la convergencia del algoritmo, considerando cruces formados desde 2 movimientos hasta 10, para condiciones de flujo no congestionado, X<1. Además, cada caso ha sido analizado para seis valores diferentes de ?, comprendidos entre 1 y 1.51, siendo 1.51 el límite de flujo congestionado. En ningún caso, de todas las situaciones analizadas, ha sido necesario realizar una tercera iteracción, habiéndose asignado siempre todos los tiempos al final de la segunda iteracción.
Bibliografía
Highway Capacity Manual. Capítulos 1, 2 y 9. Transportation Research Board. 1985.
Juan. Larrañeta Astola. Cruce aislado. Apuntes de doctorado. 1995.
Pablo Calderón Moreno. Regulación de un cruce. Análisis comparativo de diferentes criterios.
RESUMEN
La regulación del tráfico resulta esencial para convivir en las ciudades y hacerlas habitables, es conocido que las vías existentes en la mayoría de los núcleos urbanos son limitadas y la optimización de las mismas resulta imprescindible en el caso de ciudades medias y grandes donde en los últimos años se ha disparado el parque urbano existente en la misma, provocando los conocidos problemas de aparcamiento y de circulación, es este último el que aquí abordamos, pretendemos optimizar las infraestructuras e instalaciones existentes dotándolas desde el laboratorio de sistemas de reparto de tiempos.
El presente artículo tiene por objeto describir y aplicar un algoritmo matemático preciso y simple que ante condiciones variables en el tiempo del tráfico propone repartos de derechos de paso que minimizan los retrasos en la circulación urbana rodada. El algoritmo podrá ser implementado mediante el correspondiente lenguaje de programación informático para que sea ejecutado por el autómata que gobierna el cruce semafórico, ya sea desde el mismo o desde los centros de telemando de las direcciones generales de los diferentes a servicios de tráfico municipales. Con todo ello perseguimos la descongestión del tráfico mediante el aprovechamiento y optimización de las instalaciones e infraestructuras existentes sin incremento de las inversiones.
Referencias
2. En cruces simples, de fácil regulación, no hay diferencia entre los conceptos de fase y etapa.