

Mecanismo electrónico localizador para mamografía digital
Electronic locator device for digital mammography
Resumen
El mecanismo electromecánico localizador (MEL) de aplicación
en la radiología intervencionista de la mama es un sistema
de guiado en la localización de lesión no palpable en mamografía.
Ubicado en un equipo de mamografía digital (MD),
consta de dos partes diferenciadas, el mecanismo localizador
y la aplicación responsable de la automatización del mismo,
desde su estación de visualización. La interconexión entre el
equipo y el localizador permitirá mejorar la parte técnica del
procedimiento en la localización, logrando reducir el tiempo
del procedimiento y, por tanto, la incomodidad para el paciente.
Palabras clave
Mamografía, localización lesión no palpable, mecanismo localizador, aplicación informática, automatización, unidad de control.
Abstract
The electromechanical locator device (ELD) with application
in the interventional radiology of the breast is a guidance system
in the location of non-palpable lesion in mammography.
Located inside a digital mammography (DM) equipment, it
consists of two distinct parts: the locator mechanism and the
responsible application of the automation, from its display
station. The interconnection between the equipment and the
locator will improve the technical part of the procedure in localization,
reducing the time of the procedure and, therefore,
the discomfort for the patient.
Keywords
Mammography, non-palpable lesion localization, locator mechanism, computer application, automation, control unit
Recibido / received: 5.03.2017. Aceptado / accepted: 8.03.2017
Introducción
La Federación Internacional de Ingeniería Médica y Biológica (IFMBE) define la ingeniería biomédica como la integración de la Física, las Matemáticas y las Ciencias experimentales con los principios de la ingeniería, para el estudio de la biología, la medicina y los sistemas sanitarios y para la aplicación de la tecnología en la mejora de la salud y la calidad de vida.
Gracias a los ingentes avances en técnicas de adquisición de imágenes médicas y a las múltiples líneas de aplicación de las mismas se pueden prevenir y diagnosticar distintas patologías y simular y planificar las intervenciones quirúrgicas sin necesidad de someter al paciente a continuas pruebas invasivas.
En los últimos años, se está produciendo una expansión de los departamentos de diagnóstico por imagen en las organizaciones sanitarias. Las tecnologías de la información y de las comunicaciones han favorecido dicha expansión mediante la incorporación de los sistemas RIS (del inglés Radiological Information System) y PACS (también del inglés Picture Archiving and Communication System) a los departamentos de diagnóstico por imagen. Esto ha favorecido el desarrollo de las estaciones de visualización y trabajo de posprocesado que incluyen herramientas y funciones que permiten manejar adecuadamente la imagen radiológica digital obtenida.
Las funciones o herramientas esenciales son muy diversas: revisión de imagen, centrado de la región de interés de la imagen en el monitor, control de brillo y contraste, medición de distancias, ángulos y áreas, etc. Y se podrán añadir otras más complejas para controlar desde la propia estación de visualización la automatización del mecanismo electromecánico localizador (MEL).
Este se utilizará desde la estación de visualización del propio equipo de mamografía digital (MD) y su función será la de servir como sistema de guiado en la localización de lesiones no palpables en mamografía, estableciendo una relación entre la imagen digital de la misma y la lesión en la mama del paciente. La interconexión entre equipo y localizador permitirá mejorar la parte técnica del procedimiento, disminuyendo el tiempo del mismo y, por tanto, consiguiendo me-nor malestar para el paciente.
Estado del arte
El MEL tiene su ámbito de aplicación en la radiología intervencionista de la mama, y esta tiene su origen en la radiología diagnóstica como subespecialidad invasiva y diagnóstica. Hoy en día, la radiología intervencionista es una especialidad terapéutica y diagnóstica que comprende una amplia gama de procedimientos terapéuticos mínimamente invasivos guiados por imagen, como también el diagnóstico por imagen invasivo. Se utilizará como ayuda de guiado o posicionamiento en los siguientes procedimientos: localización prequirúrgica de lesiones no palpables guiada por mamografía y localización de lesiones no palpables para su marcaje mediante clip marcador previo a tratamiento posterior (Apesteguía, 2009). El equipo y los componentes tecnológicos necesarios para su realización están formado por un equipo de MD (figura 1), un mamógrafo digital directo de campo completo Siemens Healthcare (no objeto de estudio) y un dispositivo de localización que puede ser de dos tipos: plato de compresión perforado, sin mecanismo localizador, o plato de compresión fenestrado con mecanismo localizador.


Plato de compresión perforado, sin mecanismo localizador
Su ubicación es sobre el cuerpo del mamógrafo. La localización de la lesión se realiza haciendo coincidir la lesión entre alguno de los orificios del mismo. Este puede ser utilizado tanto en un mamógrafo analógico (MA) (figura 2), como en equipos de MD (figura 1).
La primera referencia de plato de compresión perforado para la localización de lesiones no palpables en mamografía (Goldberg, 1983). Rejilla multiperforada radiopaca, (Parekh, 1987) adaptable a un sistema portachasis, la paciente era colocada sobre el mismo, mediante la rejilla multiperforada a través de los orificios se localizaba el punto de la lesión (figura 3).


Plato de compresión perforado, adaptable al cuerpo de mamógrafo analógico (Barbarisi, 1990) y (Puglisi, 1999) (figura 4). Plato de compresión perforado utilizado en la actualidad en un mamógrafo digital (figura 5). Plato de compresión perforado de rejilla, (Blane, 2010) adoptando una disposición de raqueta de tenis.
En lo que se refiere a este tipo de plato de compresión, no existen más modificaciones hasta el momento actual.
La desventaja de este tipo de dispositivos está en la dificultad de hacer coincidir la lesión entre un agujero y no entre el vano del mismo, sobre todo cuando se llega a ella por vía posterior, por lo que el procedimiento de localización es más lento y, por tanto, más molesto para el paciente.

Figura 4. Plato de compresión perforado genérico.

Figura 6. Plato de compresión fenestrado alfanumérico
GE Healthcare.
Plato de compresión fenestrado con mecanismo localizador
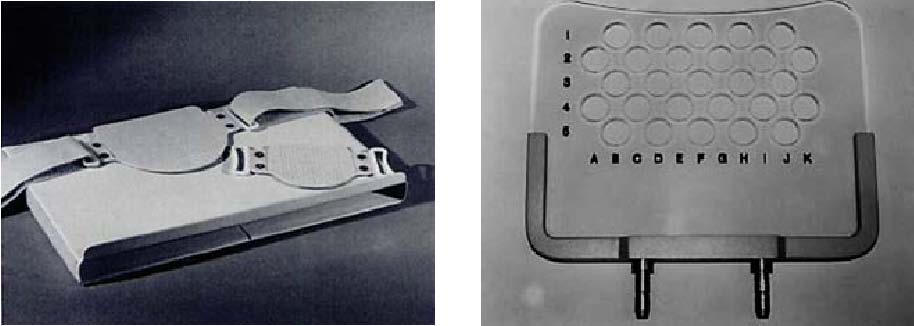
La primeras referencias de este tipo de dispositivo (Novak, 1981) para aplicaciones en mamografía analógica convencional consiste en un plato de compresión fenestrado con demarcación alfanumérica radiopaca (figura 6) y localizador de accionamiento manual (figura 7), el cual se coloca a la salida del haz de rayos x, sobre la base del colimador mediante un anclaje mecánico, en un MA (figura 2) (Kopans, 1985), (Kopans, 1989) y (Kopans, 1994) describen la técnica de colocación de arpón con este dispositivo (Selland, 2003), plato de compresión fenestrado con demarcación alfanumérica radiopaca.
 Figura 9. Posicionador de ventana Hologic. Breast Imaging Solutions. Figura 10. Plato de compresión fenestrado para mamógrafo digital Siemens Healthcare. Figura 11. Posicionador manual actual para mamógrafo digital Livingston Products Inc.
Figura 9. Posicionador de ventana Hologic. Breast Imaging Solutions. Figura 10. Plato de compresión fenestrado para mamógrafo digital Siemens Healthcare. Figura 11. Posicionador manual actual para mamógrafo digital Livingston Products Inc.El localizador consta de un sistema de corredera con dos grados de libertad que se puede mover en el plano XY. La corredera se desplaza desde su extremos mediante dos varillas metálicas coincidentes 90 grados, que bajo la luz del colimador del propio mamógrafo, nos marcan en forma de ejes coordenados el punto sobre la lesión que hay que señalar. Este punto queda proyectado a través de la ventana del plato de compresión fenestrado (figura 6); sobre el borde de la ventana del mismo tiene grabados caracteres alfanuméricos para facilitar la localización de la lesión.
Otros dispositivos de accionamiento manual son el posicionador de garras, que se fija al cuerpo del mamógrafo, y la ventana del mismo queda por debajo de la salida del haz de rayos. Mediante sendos mandos, desplazamos las varillas metálicas coincidentes 90 grados a lo largo de los ejes X e Y para realizar el marcado de la lesión, utilizando la luz de centrado. Esta quedará proyectada sobre la ventana del compresor (figura 8) y el posicionador de ventana, colocado paralelo al haz de rayos sobre la ranura de la visera de protección del mamógrafo, que funciona de igual forma (figura 9).
Siguiendo la evolución tecnológica, (Holler, 2013) encontramos el plato de compresión fenestrado con caracteres alfanuméricos mejorado (figura 10) y el localizador de accionamiento manual más perfeccionado (Livingston, 1994), se puede adaptar a un equipo de MD colocado a la salida del haz de rayos X, sobre la ranura de la visera de protección, (figura 11). La localización de la lesión se realiza mediante un puntero láser; este dispositivo es utilizado en la actualidad en nuestra unidad de mamografía.
Diseño conceptual del MEL
El objeto del MEL es la correlación del punto de una lesión obtenida mediante una imagen digital de una mamografía con la propia región que se va a examinar, mediante un mecanismo capaz de desplazarse a ese punto de forma automática. El marcaje del punto se realizará con un indicador señalador. Una vez localizado, se realizará el procedimiento radiológico correspondiente y el mecanismo volverá a la posición de partida (0,0). El efecto final del mecanismo es ser utilizado como sistema de guiado o posicionamiento.
El MEL está constituido por dos partes fundamentales: el propio mecanismo y la aplicación informática encargada del control del mismo.
Componentes del mecanismo
El mecanismo está constituido por una base sobre la cual irán fijadas dos guías lineales de precisión para aplicaciones médicas sobre su cara lateral y un puente en el que irá fijada otra guía de similares características portadora del indicador señalador. Ambas se desplazarán de forma automática en cualquier dirección del plano, mediante el accionamiento de dos servomotores de corriente continua, controlados por una unidad de control. Esta se conectará a una estación de visualización de imagen digital, un ordenador des-de el que se enviarán las coordenadas exactas al punto deseado mediante una aplicación informática.
A continuación, describiremos cada uno de los componentes, así como la aplicación que lo pondrá en funcionamiento:
El mecanismo está constituido por una base cuadrangular, con una abertura central coincidente con la ventana de la salida del tubo de rayos X del mamógrafo, en la que irá colocada para permitir la obtención de la mamografía de localización a través de dicha abertura. Esa base irá acoplada sobre la ranura de la visera de protección del mamógrafo mediante un anclaje mecánico de fácil montaje-desmontaje. La base será de acero inoxidable de alta rigidez. Además, debe estar rectificada, ya que irán fijadas sobre ella dos guías lineales de precisión sobre su cara lateral, y con el par de apriete específico, se podrá alcanzar un movimiento lineal de alta precisión del puntero señalador en la dirección del eje Y.
El puente, al igual que la base, será de acero inoxidable de alta rigidez, ya que fijada al mismo, irá colocada una tercera guía responsable del desplazamiento del puntero señalador en la dirección del eje X.
Las guías lineales propuestas para este mecanismo son de la serie de alta precisión para aplicaciones médicas, con un sistema de carril único. El acero tanto del carro como del carril es resistente a la oxidación; esto incluye también las bolas y el retenedor. Sobre el carro de la guía del puente irá fijado un soporte que se hará solidario a sendos tornillos sinfín de los servomotores encargados del desplazamiento del puntero señalador en la dirección de los ejes X e Y.
Las dimensiones de las guías elegidas se ajustarán a las dimensiones de la base y del puente e irán fijadas mediante tornillos. El par de apriete será el especificado por el fabricante para alcanzar un movimiento lineal de alta precisión.
Los servomotores son los encargados del desplazamiento de las guías en las dos direcciones del plano. Su ubicación será sobre la base soporte, sobre dos de sus caras laterales. Los servomotores irán fijados a dicha base mediante el extremo final del tornillo sinfín. Dicho extremo se hará solidario a la base para poder realizar el desplazamiento del mismo en uno u otro sentido.
Al accionar el servomotor para el desplazamiento de la guía en la dirección +X, el tornillo sinfín se introducirá en el cuerpo del motor y para el desplazamiento en la dirección –X, el tornillo sinfín saldrá del cuerpo del motor; de igual forma para el desplazamiento de la guía en la dirección +Y e -Y.
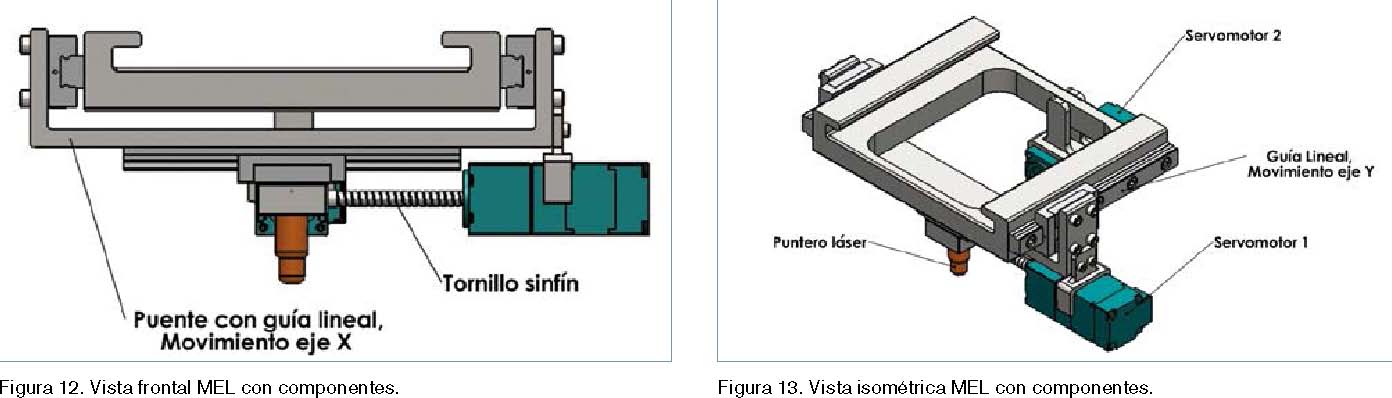
El puntero señalador irá fijado a la base soporte y colocado sobre el carro de la guía que va fijada al puente, responsable del desplazamiento horizontal del mecanismo en la dirección del eje X. El puntero señalador de líneas cruzadas emite radiación visible en el intervalo de longitudes de onda comprendido entre 400 nm y 700 nm y tie-ne una potencia igual o inferior o igual a 5 mW.
Para finalizar, vemos el mecanismo localizador con todos sus componentes, en una vista frontal (figura 12) e isométrica (figura 13).
Aplicación informática responsable del control del localizador
El MEL se controlará de forma automática desde la estación de visualización del equipo de mamografía, en el cual instalaremos la aplicación informática responsable de llevar el localizador al punto deseado.
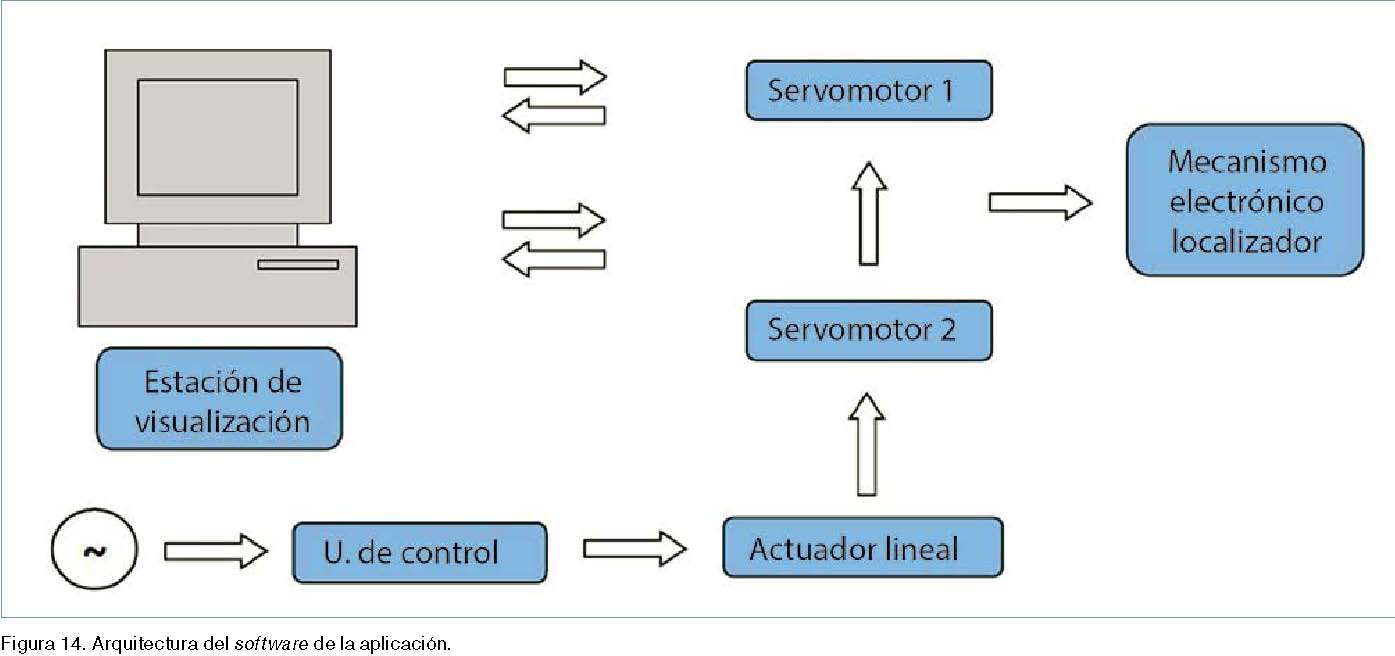
Una unidad de control será la responsable del accionamiento de los dos servomotores, que nos permitirán el desplazamiento de las guías y, por tanto, del puntero señalador al punto deseado. Todo el conjunto tendrá una tensión de alimentación controlada por la unidad de control y por la pro-pia aplicación.
El diagrama general de conexión del MEL muestra los componentes que lo integran y la interrelación entre ellos (figura 14).
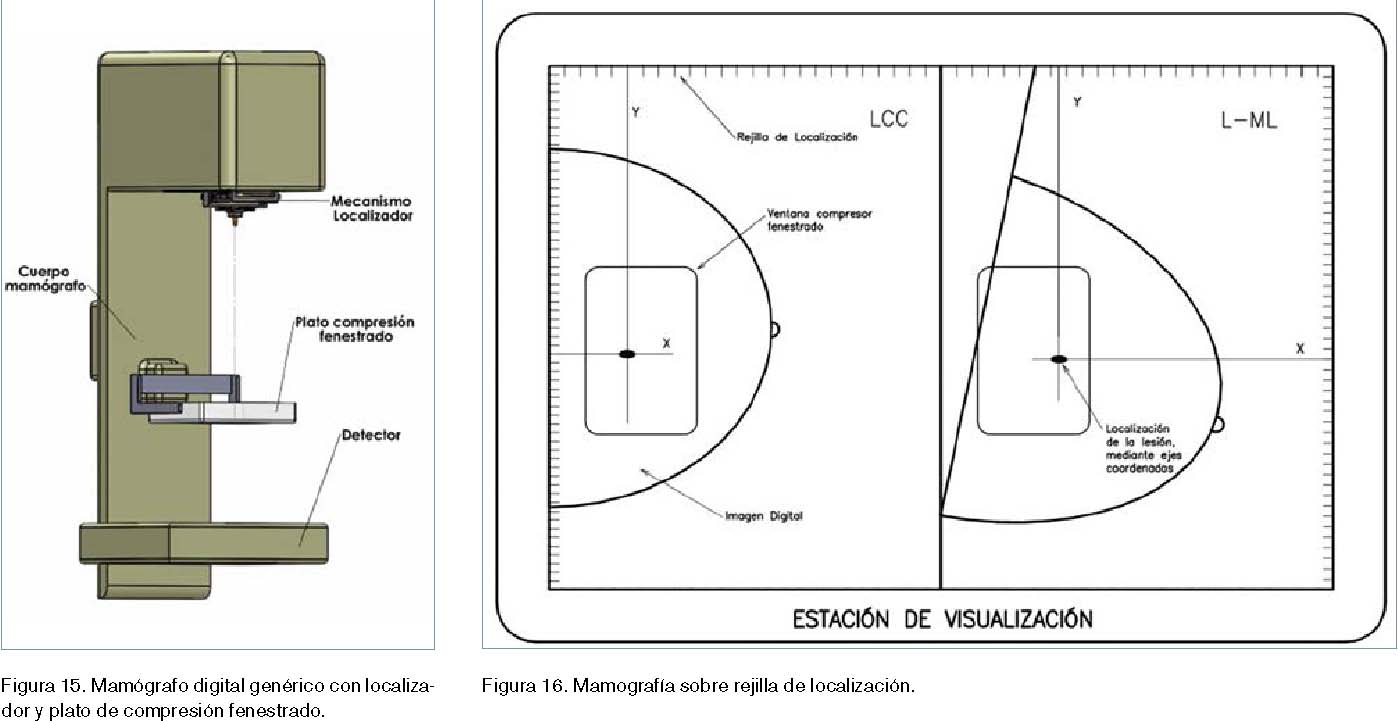
El MEL va montado sobre la ranura de la visera de protección a la salida del haz de rayos X acompañado para la realización del procedimiento radiológico de un plato de compresión fenestrado. Se ve la ubicación del mismo en un mamógrafo digital genérico (figura 15).
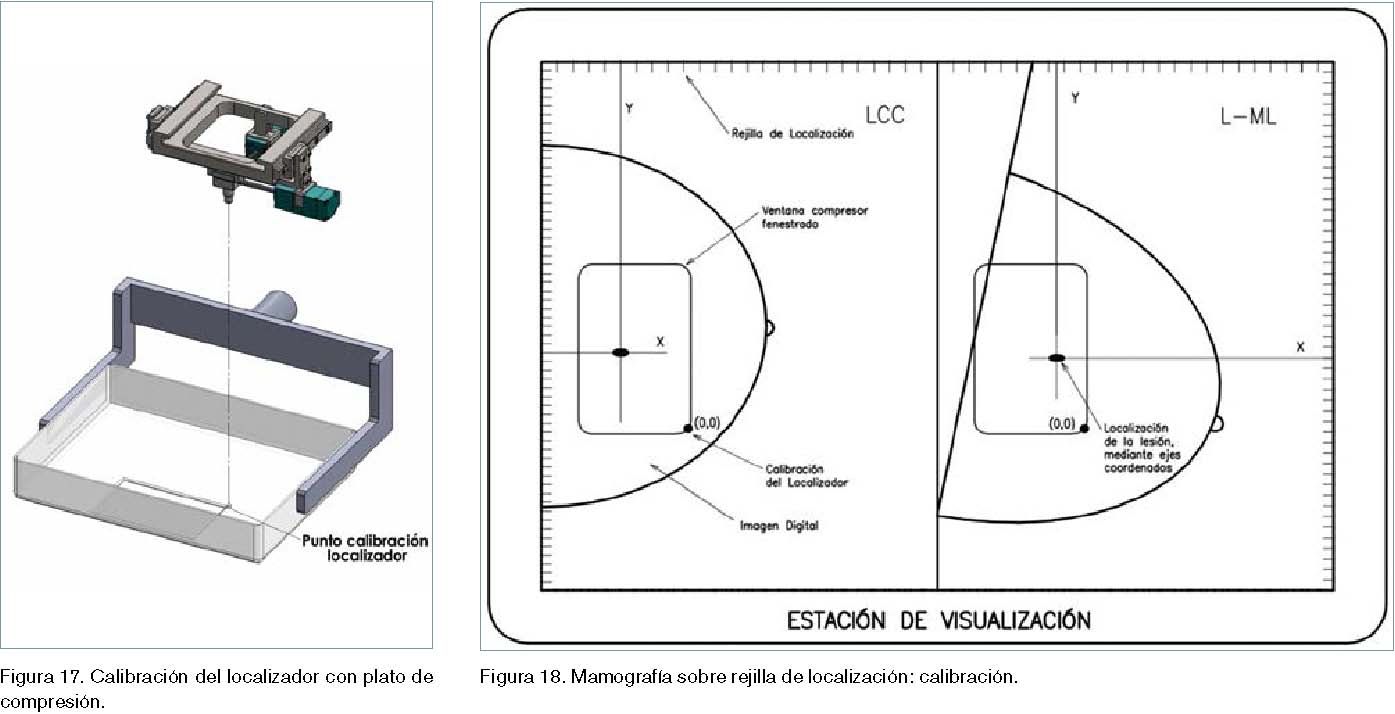
En la aplicación tenemos la rejilla de localización. Sobre esta se realizará la mamografía comprimida con el plato de compresión fenestrado. Vemos que la lesión queda dentro del mismo, en las dos proyecciones distintas, CC (cráneo-caudal) y ML (medio-lateral) de la mamografía (figura 16).
Antes de comenzar el procedimiento radiológico, es necesario realizar la calibración del MEL con el plato de compresión fenestrado. Para realizarla deberá colocarse sobre el borde externo de la ventana del mismo una marca que nos indicará el punto (0,0) para la calibración del MEL. Esta consistirá en desplazar el puntero señalador a esta posición (0,0) del plato de compresión fenestrado (figura 17).
En la aplicación en la rejilla de localización (figura 18) vemos el punto de calibración (0,0) impreso sobre la mamografía en las dos proyecciones de igual forma. Con el ratón marcaremos el punto de calibración para que el localizador vaya a la posición (0,0) del plato de compresión. Los dos servomotores son los encargados de llevar el puntero señalador a la posición indicada. El giro dextrógiro o levógiro de cada uno de los dos servomotores hace esto posible desplazándose en la dirección +X-X y +Y-Y, respectivamente.
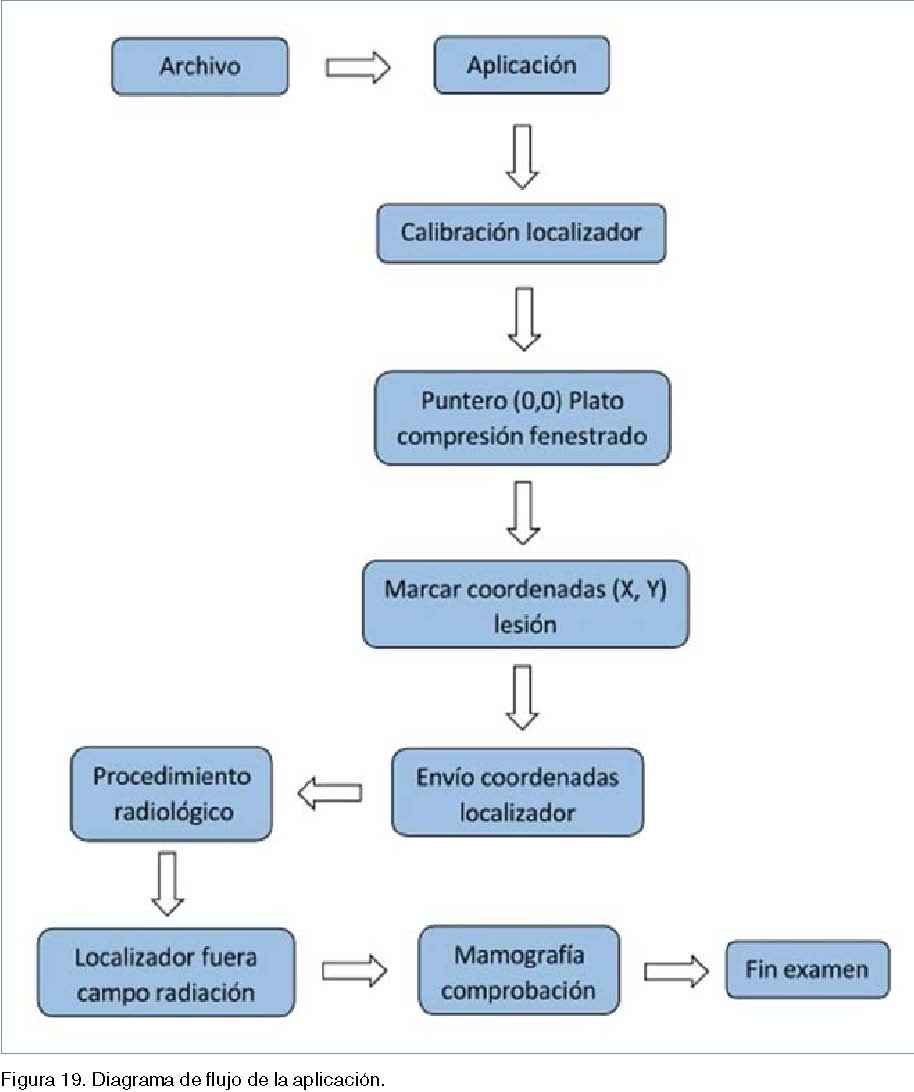
Una vez comenzado el procedimiento haciendo un clic con el ratón, fijaremos las coordenadas de la lesión sobre la imagen digital para ser enviadas al mecanismo localizador y así determinar el punto exacto al que corresponde en la mama del paciente. Primero se desplazará el servomotor 1, puntero señalador en la dirección del eje X, y a, continuación, el servomotor 2, puntero en la dirección del eje Y, consiguiendo con exactitud el punto deseado.
Todo el proceso queda descrito en el diagrama de flujo de la aplicación informática, instalada en la estación de visualización (figura 19).
Resultados
Este dispositivo dará solución a un problema técnico detectado con el dispositivo actual que mejorará la parte técnica del procedimiento, obteniendo como resultado un beneficio para el paciente. La ingeniería técnica industrial dentro de la innovación sanitaria permite poder desarrollar tanto ideas innovadoras de dispositivos médicos como mejoras en procedimientos para que el paciente, como usuario final, se beneficie de ellas. En la actualidad nuestro empeño es poder desarrollar un prototipo del mecanismo localizador, así como poder integrar la arquitectura del software de la aplicación en una unidad de mamografía digital genérica para poder controlarlo desde la misma. La interconexión equipo-localizador permitirá mejorar la parte técnica del procedimiento en la localización, logrando reducir el tiempo del procedimiento y, por tanto, el malestar para el paciente, así como optimizar y mejorar la agenda de la sala. Así se consigue disminuir el personal técnico dentro de la misma, ya que el posicionamiento se realiza de forma automática consiguiendo mayor rapidez y precisión.
Conclusiones
Gracias a la tecnología disponible y a las posibilidades que nos brindan las estaciones de trabajo radiológicas, en la actualidad es posible que el MEL interactúe con un mamógrafo digital genérico. Se han presentado distintos sistemas de posicionamiento previos a nuestro dispositivo localizador automatizado. El diseño del localizador se ha desarrollado en dos partes diferenciadas: el propio mecanismo y la aplicación informática encargada del control del mismo.
Este trabajo fue expuesto en 2014 como proyecto de fin de carrera en la ETS de Ingeniería y Diseño Industrial de la Universidad Politécnica de Madrid. Dado lo novedoso de la invención, el proyecto fue presentado como patente de invención en la Oficina Española de Patentes y Marcas bajo el título Mecanismo electromecánico localizador de lesiones no palpables en mamografías en octubre de 2014. Le fue concedida la patente por dicha oficina, como modelo de utilidad, con fecha 6 de abril de 2016. Igualmente, con fecha 7 de abril de 2016, se publica por dicha oficina la extensión de la patente vía Tratado de Cooperación de Patentes (PCT).
El trabajo, presentado en representación del Colegio de Ingenieros Téc-nicos Industriales de Madrid, ha sido galardonado por la Fundación Técnica Industrial en su convocatoria Premios Fin de Grado 2015 de carácter nacional.
Referencias
Apesteguía Ciriza L, Iríbar de Marcos M, López Ruiz JA, Mariscal Martínez A, Martínez de Vega V, Pina Insausti L et al. (2009). Procedimientos Intervencionistas de la mama. Sociedad Española de Diagnóstico por Imagen de la Mama. SEDIM.
Barbarasi L. Mammography compression apparatus for prosthetically augmented breast. US 4943986. BOPI 24-07-1990.
Blane CE, Goodsitt MM, Grimm JC, Pavlik J, Jonathon DM, Ong T et al. (2010). New Compression Paddle for Wire Localization in Mammography. Academia de Radiología 17:142-145.
Gabriele et al. Breast compression and needle localization apparatus. US 4691333. BOPI 1-10-1987.
Goldberg RP, Hall FM, Simon M (1983). Preoperative Localization of Nonpalpable Breast Lesions Using a Wire Marker and Perforated Mammographic Grid. Radiology 146:833-835.
Holler et al. Siemens Aktiengesellschalf assignee. Compression plate for a mammography unit and mammography unit. US58611491B2. BOPI 17-122013.
Livingston TW, Northbrook Ill. Livingston Products, Inc., Wheeling, Ill assignee. US 5320111. BOPI 14-06-1994.
Martínez A, Chavarría M (2012). Manual de salud electrónica para directivos de servicios y sistemas de salud. Publicación de las Naciones Unidas 6: 153-165. Disponible en: http://www.cepal.org/ es/publicaciones/3023-manual-salud-electronicadirectivos-servicios-sistemas-salud.
Parekh NJ, Wolfe JN (1987). Localization Device for occult Breast Lesions: Use in 75 Patients. AJR
148: 699-701.
Puglisia F, Pertoldib P, Ramelloc M, Facecchiad I, Zuianie CH, Bazzocchie M et al. (1999). Diagnostic accuracy of perforated compression grid approach for mammographic ally guided core needle biopsy of breast lesions. Cancer Letters 146: 181-188.
Kopans DB, Lindfors K, McCarthy KA, Meyer JE (1985). Spring hookwire breast lesion localizer: Use with Rigid-Compression Mammographic Systems. Radiology 157:537-538.
Kopans DB, Swann CA (1989). Preoperative Imaging-Guided Needle Placement and Localization of Clinically Ocult Breast Lesions. AJR 152:1-9.
Kopans DB, McCarthy KA, Hall DA, Whitman GJ, Hulka CA, McGinty GB et al. (1994). Technical Developments and Instrumentation. A Simple Device to Assist in Needle Positioning Procedures. Radiology 191: 868-869.
Selland DL, Needham MA. The Brigham and Women’s Hospital Inc., assignee. Compression apparatus for diagnostically examining breast tissue. US 6507748B2. BOPI 14-06-2003.