

Los inicios del regulador PID
Introducción histórica a los orígenes de este regulador proporcional, integral y derivativo habitual en la regulación automática
Introducción
El conocido controlador denominado de “tres términos” o más comúnmente llamado PID “proporcional + integral + derivativo” ha sido y continúa siendo muy empleado en el ámbito de la regulación. Su utilización procede del de sarrollo del regulador de tres términos por parte de las compañías de control de procesos e instrumentación. Se dice que el primer controlador de este tipo fue introducido por la Taylor Instrument Company en 1936 cuando fue incluida la acción derivativa (preact) a su controlador de doble respuesta. Inicialmente la cantidad derivativa fue fijada en fábrica, pero en 1939 fue introducida la acción derivativa continua variable a un regulador. Es importante destacar que fue durante el período 1939-1940 cuando George A. Philbrick desarrolló su simulador analógico electrónico, al cual le incluyó un controlador PID.
El uso de una acción derivativa e integral en la década de 1930 no era algo nuevo; muchos controladores que fueron desarrollados a lo largo del siglo diecinueve las incluían. Inicialmente se llegó a la conclusión de que el offset podría ser retirado con la introducción de una acción integral. Lo que sí era novedoso era la introducción de controladores de propósito general con una acción continua de control variable. Una consecuencia de la introducción progresiva de estos controladores fue el creciente interés en la dinámica de varios procesos y ensayos típicos para analizar el comportamiento de los reguladores. Sin embargo, los autores de muchos documentos técnicos eran desconocedores de que Nicolás Minorsky, en 1922, en su trabajo sobre “Estabilidad direccional de cuerpos di rigidos automáticamente”, había analizado y discutido las propiedades de los controladores tipo PID; el trabajo se posiciona con los de Maxwell, Routh y Hurwitz como una de las primeras discusiones sobre teoría de control.
El documento muestra el trabajo sobre la instalación y preparación de la prueba de un sistema de gobierno automático del buque de guerra New Mexico, pruebas que tuvieron lugar en el año 1923. Había habido algún interés en los sistemas de gobierno totalmente automatizados desde la introducción por primera vez del servomotor controlado en 1864, pero fueron pocos los avances alcanzados hasta que el sector naval de guerra comienza a revisar sus técnicas de control de disparo a comienzos del siglo veinte. Esta revisión fue necesaria debido al incremento del tamaño de los cañones. El resultado de los estudios fue el incremento del interés en:
1. El desarrollo de un girocompás debido a que los buques pasaron a ser de hierro, además de un incremento en el empleo de la electricidad en los buques, lo que dio lugar a grandes dificultades en el empleo de compases magnéticos.
2. La estabilidad tanto del buque como de las plataformas y directores de cañones.
Se consideraron las posibilidades de mejorar la precisión a través de la reducción o eliminación de la “guiñada” del buque. Sir James Henderson, quien estaba en contra de los gobiernos automáticos y cuya actitud no cambió hasta la introducción exitosa del autopiloto comercial, remarcaba en 1934 “…mi primera aproximación al problema de gobierno automático con objeto de eliminar la guiñada fue hecha más en relación con la artillería que con la navegación”. Pese a que las pruebas llevadas a cabo por Minorsky en el New Mexico fueron un éxito, el sistema automático de gobierno fue retirado y puesto en funcionamiento de forma discontinua.
Gobierno automático de buques
Nicolás Minorsky nació el 24 de septiembre de 1885 en Korcheva, Rusia, y murió a la edad de 85 años el 31 de julio de 1970, en Italia. Estudió en la Escuela Naval de San Petersburgo (más tarde Petrogrado y ahora Leningrado) y en 1908 marchó a estudiar a Francia a la Universidad de Nancy, en el Departamento de Ingeniería Eléctrica. Trabaja entonces en la Escuela Técnica Imperial de Petrogrado hasta el 1914, pasando a servir en la Armada Rusa siendo durante un año Agregado Adjunto de la Armada en la Embajada Rusa de París. En junio de 1918, emigró a los Estados Unidos y allí permaneció hasta su retiro en 1950, en las estribaciones de los pirineos.
Durante los primeros cuatro años en EE.UU. trabajó como asistente de C.P. Steinmetz en la General Electric Company, Schenectady, Nueva York. No se sabe qué tipo de trabajo ha estado realizando durante ese período, pero por las evidencias de sus trabajos publicados en 1922 y en 1930 podría decirse que trabajó en problemas de gobierno automático, aunque en las publicaciones no hace referencia a alguna involucración de General Electric Company en su trabajo. Este trabajo estaba relacionado con su experiencia e interés, ya que en 1916, mientras servía en la Armada Rusa había realizado medidas de la sensibilidad del ojo en la detección de velocidades angulares. El propósito de las pruebas era el comparar la habilidad de una persona para detectar pequeñas rotaciones angulares con el giro del indicador de velocidad angular del giroscopio –el girómetro– que él había inventado.
Casi desde la primera introducción del sistema de gobierno servocontrolado en 1984, se pensó en un sistema de gobierno totalmente automático; la dificultad estaba en la sensibilidad de la posición de la aguja del compás magnético sin distorsionar la precisión de ello como indicador. Se diseñaron sistemas para aplicaciones más limitadas, las cuales eran para ser utilizadas bien en gobiernos remotos o, en torpedos, para mantener una ruta constante predeterminada; para aplicaciones posteriores, se usaron giroscopios. Las disposiciones de gobiernos totalmente automáticos empiezan a ser factibles con el trabajo de Anschutz-Kaempfe, y después de Elmer Sperry, sobre el desarrollo del girocompás.
Anschutz-Kaempfe para su expedición toma un submarino al Polo Norte, proponiendo usar un compás basado en el uso de un giroscopio libre. Él formó, en consecuencia, una compañía para fabricar girocompases, que tuvieron más éxito que los de la compañía Sperry. Elmer Sperry obtuvo la patente básica de su girocompás en 1911, y la primera patente de un sistema de gobierno automático (el giropiloto) fue registrada en 1914. Los desarrollos de los giropilotos se interrumpieron por la guerra y los trabajos no se reiniciaron hasta 1921. Probablemente el aspecto más importante de este trabajo fue el desarrollo de Sperry de un mecanismo de seguimiento (follow-up) –un servomecanismo de posición– el cual hizo que se dispusiera de una señal adecuada para introducir en la máquina de gobierno.
Cuantitativa e intuitivamente, los requerimientos para un buen gobierno se dieron a conocer: “Un eficiente timonel mantiene el buque en su curso con precisión ejerciendo un adecuado control del tiempo buscando y facilitando las acciones del timón”, escribió Minorsky. Sperry expresó el requerimiento en términos muy similares, y Henderson escribió “…la segunda exigencia es comprobar que el timón pare de balancearse, ya que el buque se aproxima al curso prescrito….”; él continuó indicando también la necesidad de un timón de barlovento y sotavento para compensar la tendencia debida a las fuerzas perturbadoras estables que desvían el buque del curso deseado. Las preguntas y problemas llevaron a analizar tales comportamientos y se incorporaron dispositivos al sistema de control de gobierno para comprobar y detectar el tiempo atmosférico. En estas actividades Minorsky tuvo éxito; sin embargo, falló en las destrezas comerciales; el sistema de Sperry fue más exitoso comercialmente y fue ampliamente utilizado, descrito por Dr A.L. Rawling, un director de Sperry Company como “….una máquina muy simple y ello aplica un timón de desviación y otro de comprobación. El método de aplicación del timón de comprobación es francamente un truco”.
Minorsky afronta el problema analítico del director de Sperry y fue el primero en argumentar que un buen gobierno no era una cuestión de intuición basado en observaciones de un período de tiempo. Así pues, el gobierno con precisión no es más que una especie de control complicado del tiempo del timón junto con la inercia del cuerpo a ser gobernado de este modo se ha de ser capaz de establecer analíticamente qué tipo de medida de tiempo debe ser adoptada con objeto de alcanzar la mejor condición posible para la estabilidad direccional del cuerpo a ser gobernado en su curso.
Su siguiente paso fue característico de su aproximación a los problemas para el resto de su vida; unos conocimientos de no linealidad en sistemas, que para él simplifica inmediatamente el problema limitándolo a consideraciones de pequeñas desviaciones “…para el caso de movimiento angular ilimitado… no hay expresión analítica aplicable a los diferentes pares que actúan sobre el buque en general”
Considerando la dinámica del buque, incluyendo las características de los timones, le condujo a una ecuación del movimiento, como la de la expresión 1.
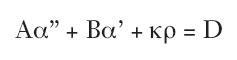 (1)
(1) Donde a es el ángulo de desviación del buque sobre el curso deseado y ? es el ángulo del timón, A es el momento de inercia efectivo del buque sobre un eje vertical pasando por el centro de grave-dad, B es la resistencia a la fricción del buque al girar, D es el par distorsionador, y k es una constante que depende de las características del timón. De esta forma, con tal que el ángulo ? del timón sea dado como una función de la desviación y sus derivadas, el problema está completamente determinado.
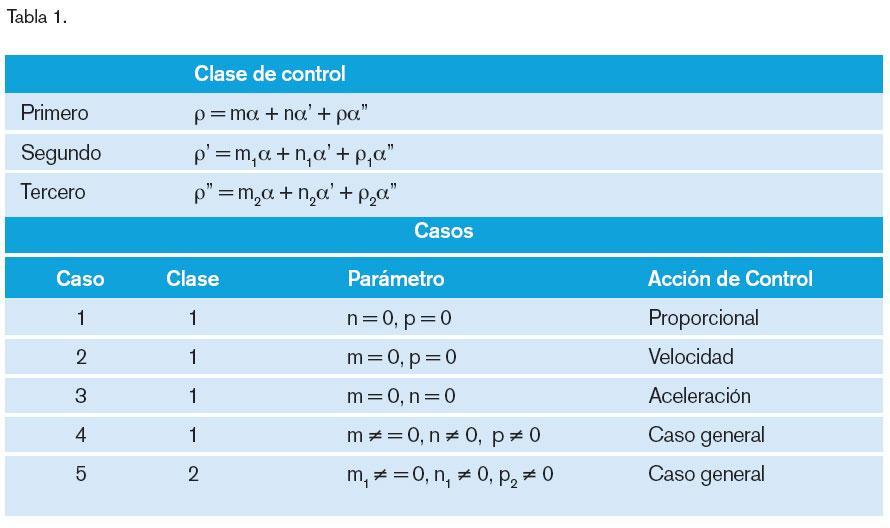
Minorsky consideró casos individuales para varios tipos de regulación, y éstos se recogen en la tabla 1. La tercera clase que controla la aceleración del timón no fue considerada en detalle ya que no es de interés práctico.
El caso 1, el cual sólo usa la desviación angular para controlar el ángulo del timón, representa el sistema que ha sido tratado por varias personas y da lugar a un sistema de segundo orden. Minorsky señaló que la regulación del sistema era dependiente del parámetro u de la expresión 2.
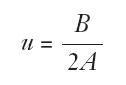 (2)
(2) y observó que para buques de gran tamaño el término B, que representa la resistencia friccional al giro, se incrementa menos rápidamente que la inercia del buque. Era así capaz de explicar por qué el control de la desviación, que había sido usado razonablemente con éxito en pequeños buques, no trabajaba en buques grandes. Para los casos 2 y 3, mostró que no había estabilidad direccional (tabla 1).
Considerando el caso 4 le condujo a concluir que el método “…es eficiente desde el punto de vista del control del efecto de una distorsión desaparecida, pero no eliminará el efecto de una acción estable del par de distorsión, tal como por ejemplo, un viento estable.” Y observó que en tales circunstancias, habría un error en régimen permanente
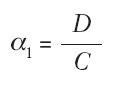 (3)
(3) donde C = km, y que “Esta primera clase de dispositivo de gobierno, actuando hará regular el ángulo del timón, y es impracticable por esta razón”. Sin embargo, observó que la segunda clase de dispositivo en el cual “….no el ángulo del timón, sino la proporción en la que el ángulo es variado” no tiene esta desventaja y, todavía, mantiene todas las ventajas del de la primera clase.
En la segunda clase, el controlador tiene la forma
 (4)
(4) y substituyendo por ? en la expresión 1, da lugar a la expresión 5:
 (5)
(5) la cual, derivando y reordenando, da lugar a la expresión 6
 (6)
(6) Minorsky comenta que para una perturbación actuando de forma estable D’= 0; “….de las cuales se concluyen resultados notables de tales perturbaciones que no tienen influencia sobre la operatividad del dispositivo, dependiendo solamente de la inercia A del buque, la resistencia B y de las constantes, m, n, ?, que representan las intensidades de los componentes correspondientes del control”
Desde el control variable, el cual afecta al rumbo del buque, permaneciendo quieto el ángulo del timón, Minorsky, en su segundo tipo de dispositivo de gobierno, tiene en efecto que cambiar las características del controlador por la expresión 7.
 (7)
(7) Así, su primer tipo es un controlador proporcional + derivativo + derivativo segundo, y su segundo tipo es un controlador proporcional + integral + derivativo.
Minorsky entonces continúa la demostración, usando el criterio Hurwitz, que para asegurar la estabilidad deben ser satisfechas las siguientes condiciones de la expresión 8.
 (8)
(8) En una sección final del trabajo (escrito) él considera cómo tendría que controlar el segundo tipo en presencia de un retraso en el tiempo en el sistema de transmisión. Obteniendo un controlador con la forma de la expresión 9.
 (9)
(9) Usa una aproximación basada en el desarrollo de Taylor, asumiendo que los retrasos T1, T2, y T3 son pequeños con respecto al período de la guiñada del buque, para obtener las siguientes condiciones de estabilidad mostradas en la expresión 10.
 (10)
(10) En sus conclusiones, usa el concepto de la anticipación del movimiento angular –un tópico corriente era controlar de forma anticipada, y que ya se ha citado cuando la acción derivativa era introducida en el proceso de control denominada preact– el comentario de Minorsky es que “….es aparente que todos los métodos posibles de control de timón no anticipan realmente la distorsión del movimiento angular, pero apenas utiliza su movimiento inicialmente cuando su valor es pequeño con el fin de dar un tiempo adecuado de reacción. De esta forma es obvio que la distorsión del movimiento angular debe ocurrir necesariamente antes de que cualquier medio de control pueda operar”, enfatizó Minorsky.
Prueba del New Mexico
Las pruebas en el New Mexico fueron llevadas a cabo por Minorsky para el Bureau of Construction de la Armada de los Estados Unidos en 1923, aunque no fueron anunciadas hasta 1930. El New Mexico fue elegido para estas pruebas porque se ajustaba al equipo de gobierno electrohidráulico de Waterbury, el cual era diferente de la mayoría de otros tipos en uso en ese momento, y que permitió acciones continuas de control. Los instrumentos de medida usados fueron un girocompás de Sperry y el llamado girómetro, un dispositivo usado para medir la velocidad angular. A pesar de sus comentarios sobre la no idoneidad del primer tipo de control –control del ángulo del timón– Minorsky usó el método para sus ensayos; inicialmente usando el control proporcional + derivativo y más tarde introduciendo una componente de aceleración en el controlador. (En un artículo en The Engineer en 1937, Minorsky declara que fue usado el control de la velocidad del timón, pero en el artículo original, él claramente dice que fue usado un primer tipo –control del ángulo del timón–, y examinando los circuitos dados en ambos trabajos, escritos, se confirma esto).
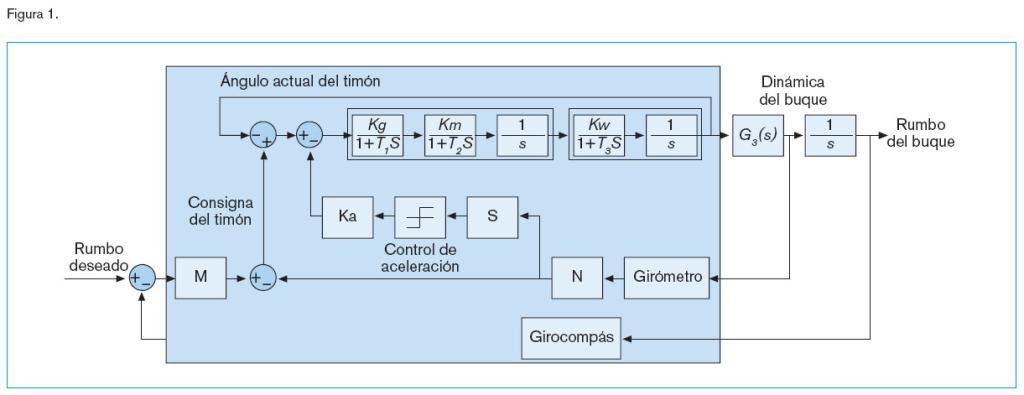
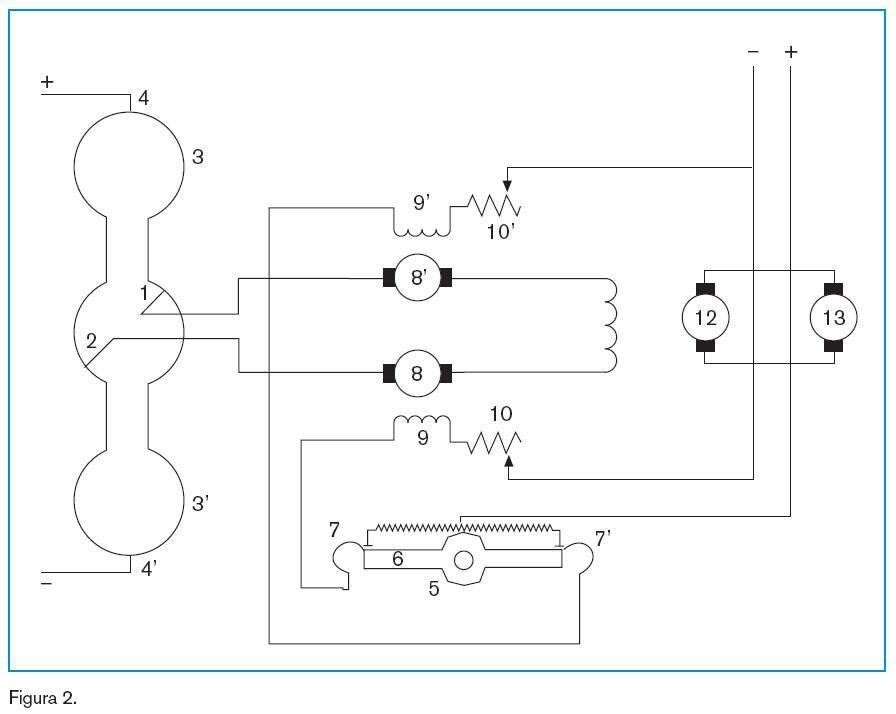
El sistema, que incluye el control de aceleración, se indica en el diagrama de la figura 1. El mecanismo utilizado para introducir una componente de la aceleración era muy simple –un contacto acoplado holgadamente siguiendo al eje– el efecto del mismo es dar una acción retransmisora con alguna histéresis. El método de combinación de las señales del girómetro, girocompás, aceleración y posición del timón se muestran en la figura 2. El girocompás y girómetro fueron ambos fijados con motores de seguimiento, tal que el ángulo girado por los ejes de los motores representaba la posición angular del buque y la velocidad angular de la guiñada, respectivamente. Sus señales fueron combinadas usando un engranaje diferencial, cuya relación fijada era de 1:2 (girocompás: girómetro). La salida desde el diferencial era usada para fijar la posición de la escobilla del potenciómetro 1. La posición de las escobillas 3 y 3’ fueron fijadas por la posición del timón. El voltaje suministrado desde la combinación del potenciómetro era usado para proveer el campo de corriente para un grupo motorgenerador (12, 13 en figura 2). Con objeto de proveer el control de la aceleración, la palanca (leva) 6, acoplada holgadamente al sistema de seguimiento del girómetro, conectada al suministro de campo a uno de los dos generadores de apoyo (8 y 8’), los cuales fueron intercalados en serie con el campo del generador del grupo motor-generador. La cantidad de ayuda dada era controlada por el ajuste de los potenciómetros 10 y 10’ y, de esta forma, la cantidad de control introducido de la aceleración podría ser ajustada.
Las pruebas tenían el objetivo de determinar los parámetros del controlador, y se comprobó claramente que la señal que podría ser obtenida desde el girómetro (la acción derivativa) era insuficiente para dar un buen control: el buque se asentó en un movimiento de guiñada de ± 2 grados. Desde estas pruebas iniciales, las cuales duraron solamente unos pocos minutos (el New Mexico estaba en aquel tiempo en maniobras de la flota), él concluyó que dos métodos podrían ser utilizados para mejorar los resultados:
1. para incrementar la proporción del control del girómetro o
2. para introducir el control de la aceleración.
Él se decantó por el último porque era más fácil de instalar. Un sistema simple era más rápido de instalar en el mar, y esto ofrecía resultados prometedores; una disposición más permanente fue instalada durante el mes de septiembre de 1923. El efecto de introducir el control de la aceleración fue dramático; el indicador del timón en el puente de gobierno no mostró movimiento alguno (el mínimo movimiento que podría mostrar era de 5 grados) y un examen del movimiento real del timón indicó que era muy pequeño, no excediendo de 2 o 3 grados.
A pesar del éxito de estas pruebas, el equipo de gobierno fue desmontado del New Mexico, y no trabajó más con sistema automático hasta la década de 1930, siendo la principal razón de esto la explicada por el capitán H. S Howard de la Armada estadounidense, que decía “….el personal de operaciones a bordo era extremada y definitivamente opuesto a los sistemas de gobierno automáticos, y ellos deseaban que no hiciéramos nada más en tanto que las pruebas no fueran completadas”. Entre el año 1923 y 1930, la compañía Sperry desarrolló de forma extensiva su versión para uso comercial de su piloto automático, y Minorsky vendió su patente a la corporación Bendix en 1930.
El sistema de Sperry no fue descrito en detalle hasta el año 1937 cuando Minorsky lo analizó en sus artículos en el The Engineer. Mostró que el llamado dodge (truco) era en efecto un método de introducción del control de la aceleración, y el sistema de Sperry usaba el control proporcional + aceleración del ángulo del timón.
Trabajos posteriores de Minorsky y su influencia en desarrollos de conrol
Desde 1923 a 1934, Minorsky trabajó en la Universidad de Pensilvania como profesor en el área de la electrónica y física aplicada; él entonces se unió al Laboratorio de Investigación de la Armada estadounidense y trabajó en el canal de experiencias David Taylor, trabajando mucho sobre la estabilización de los buques por el efecto del balanceo. Su principal preocupación estaba en el método del tan-que activo de estabilización, y él hizo contribuciones en este campo tanto desde el punto de vista teórico como práctico. Durante la guerra, Minorsky era consultor especial del director del canal David Taylor, en el cual trabajó mucho en problemas sobre la estabilidad; fue en este período cuando empezó a interesarse de forma intensa en sistemas no lineales. En 1946 se unió a la División de Ingeniería Mecánica de la Universidad de Stanford donde continuó su trabajo sobre problemas de estabilidad de buques y sobre su creciente interés en el área de mecánica no lineal. Ésta era un área en la cual continuó trabajando después de su retiro en Stanford a la edad de 65 años en 1950; su último trabajo escrito fue publicado en 1968, justo dos años antes de su muerte en 1970.
Los primeros trabajos de Minorsky sobre gobierno automático influenció a Harold Hazen y esto puede verse en los trabajos escritos de Hazen sobre servomecanismos, publicados en 1934. Estos trabajos pasaron a formar la lectura básica de muchos de los nuevos ingenieros de control. Además de esto, el trabajo de 1922 no fue extensamente conocido, y fuera del campo de la ingeniería naval, Minorsky y su trabajo pasaron desapercibidos hasta que la serie de artículos escritos por él fueron publicados en The Engineer en 1937. Para los pocos que descubrieron los trabajos, sin embargo, el trabajo era significativo y presentaba un claro entendimiento teórico de los problemas. Además, el funcionamiento de los dispositivos propuestos podía ser claramente entendido y relacionado con la teoría, dando así una buena base para futuros desarrollos y una transferencia de los principios a problemas análogos. En contraste, el trabajo del giropiloto de la compañía Sperry, aunque comercialmente exitoso, fue basado sobre el entendimiento intuitivo de Elmer Sperry, y los principios no fueron claramente entendidos hasta que Minorsky analizó el sistema en 1937.
En 1941, Minorsky publicó un extenso trabajo en el Journal of the Franklin Institute en el que se mostraba una variedad de problemas de control lineal y no lineal y esbozaba un método de análisis basado en técnicas de operador; el trabajo, de hecho, recibió poca atención, debido a la falta de simplicidad y de fácil y rápido entendimiento en comparación con otros trabajos del momento, por ejemplo, el trabajo de H. Harris publicado en 1941 y los trabajos, aparecidos durante la guerra, del Laboratorio Radiación del MIT (Massachusetts Institute of Technology). Ello provocó, sin embargo, un cambio en la dirección de los trabajos de Minorsky hacia los problemas no lineales, y su mayor contribución en esta área fue prestar más atención a los trabajos de los matemáticos rusos en particular de Liapunov y a los entonces nuevos trabajos de Bogoliubov y Krylov.
En su retiro se dedicó a la enseñanza, y continuó el trabajo en su país adoptivo a través de contratos con Office of Naval Research y siguió de cerca desarrollos de autores rusos, trabajo que informó en su último libro, publicado en 1969; sin embargo, a través de programas de traducción, muchos de los trabajos rusos eran ampliamente conocidos, y el intercambio de ideas tuvo lugar a través de reuniones del IFAC. Minorsky no estaba bien enterado de los desarrollos que tenían lugar en EE.UU. A causa de esto, su último trabajo no fue tan importante como, por ejemplo, el libro Introducción a la mecánica no lineal, publicado en 1947, el cual llegó a ser un trabajo de referencia para los investigadores en el campo de control no lineal.
Permítannos citar la última palabra de Flugge-Lotz quien, escribiendo en 1971, recordaba “….el alto y delgado hombre presentando el tipo de ‘gran señor’ (ojo, es francés) cuando él estaba caminando con su característico sombrero doblado de fieltro blando por el campus de Stanford, perfectamente absorbido en sus ideas científicas”.
Bibliografía
Mindell, David A. Between human and machine: Feedback, Control, and Computing before Cybernetics. Johns Hopkings Paperbacks edition, 2004.
Bennett, S. Nicolas Minorsky and the automatic Steering of Ships, Control System Magazine:10-15, 1984
RESUMEN
A día de hoy, en cualquier temario afín con regulación automática se abordan cuestiones relacionadas con reguladores PID, desde las diferentes topologías, hasta el cálculo de los parámetros que incorpora. Pero obviamente los descubrimientos han sido graduales en el tiempo, y en ellos han intervenido muchas personas. En este aspecto cabe destacar la labor llevada a cabo por un investigador llamado Nicolás Minorsky en el ámbito de los controladores PID, pudiendo considerar que este científico es el que ha descubierto el mencionado regulador. En este artículo se pretende hacer una pequeña introducción histórica de los inicios de este controlador.