

Análisis técnico y funcional de un sistema de elevación de agua de la época romana
Technical and functional analysis of a water lifting system from Roman times
Ana María Gómez Amador 1, Álvaro Joya Machado 1, Leopoldo Prieto Fernández 1, Alejandro Quesada González 1, Juan José Jiménez de Cisneros Fonfría 2, Higinio Rubio Alonso 1
Resumen
Se ha realizado el modelado geométrico mediante un programa CAD y un análisis mecánico de un sistema ideado hace, aproximadamente, 2.000 años por el ingeniero romano Vitruvio. El mecanismo denominado paternóster o patenotre es un sistema de bombeo vertical que se asemeja a un rosario. Cuenta con un sistema de tracción tipo cuerda con nudos o discos que empuja el agua a través de un tubo por la fuerza de una rueda en la parte superior del pozo o lugar de trabajo. Se ha utilizado el programa de diseño asistido por ordenador, Solid Edge, en su versión 2020 para obtener el modelo tridimensional del mecanismo romano y su documentación detallada de bocetos y visualización geométrica. El modelo se basa en el sistema de escalado autónomo de las minas de sal de Leninz en Gipuzkoa, España, así como en el sistema de accionamiento manual de las minas de sal de Wieliczka en Cracovia, Polonia. El modelado 3D del sistema permite explicar el montaje y el funcionamiento mecánico de este invento vitruviano, y muestra tanto su sencillez y originalidad como su fiabilidad. Después de modelar y ensamblar el mecanismo, este se estudia en condiciones mecánicas de trabajo. Por tanto, el modelo a escala se somete a un análisis de semejanza mediante trabajos de carga sobre los elementos principales del sistema, analizando los factores de fuerza y sus efectos sobre el eje. Al mismo tiempo, el estudio permite recrear el modelo utilizando una escala diferente y aplicar las fórmulas para obtener las condiciones de trabajo adecuadas para el análisis de semejanza.
Palabras clave: Modelado, sistema elevación de agua, bombeo de agua en minas, análisis de semejanza.
Abstract
Geometric modeling has been carried out using a CAD program, and also a mechanical analysis of a system designed, approximately, 2000 years ago by the Roman engineer Vitruvius. The mechanism, called paternoster or patenotre, is a vertical pumping system that resembles a rosary. This has a rope-type traction system with knots or discs that pushes water through a tube by the force of a wheel at the top of the well or workplace. The computer-aided design program, Solid Edge, in its 2020 version, has been used to obtain the three-dimensional model of the Roman mechanism and its detailed documentation of sketches and geometric visualization. The model is based on the autonomous scaled system in the Leninz salt mines in Gipuzkoa, Spain, as well as the manual drive system of the Wieliczka salt mines in Krakow, Poland. The 3D modeling of the system allows us to explain the assembly and mechanical operation of this Vitruvian invention, showing both its simplicity and originality, as well as its reliability. After modeling and assembling the mechanism, it is studied under mechanical working conditions. Therefore, the scale model is subjected to a similarity analysis through load work on the main elements of the system, analyzing the force factors and their effects on the axis. At the same time, the study allows the model to be recreated by using a different scale and the formulas to be applied to obtain the appropriate working conditions for the similarity analysis.
Keywords: Modeling, water lifting system, pumping water in mines, similarity analysis.
Recibido/received: 01/06/2023 Aceptado/accepted: 10/10/2023
1 Departamento de Ingeniería Mecánica. Universidad Carlos III de Madrid.
2 Departamento de Ingeniería Mecánica y Minera. Universidad de Jaén.
Autor para correspondencia: Ana María Gómez Amador; e-mail: amgomez@ing.uc3m.es
1. Introducción
Se suele admitir que, durante la historia de la humanidad, todo proceso bélico impulsa el desarrollo o el avance científico en todas las áreas de conocimiento. El desarrollo de modelos CAD (Computer Aided Design) comenzó con la Guerra Fría (segunda mitad del siglo XX) (Landes, 1987) y hoy continúan desarrollándose nuevos módulos (Marchante, 2020; Jaycon Systems, 2022). Muchas técnicas de diseño en tres dimensiones o vectoriales, entre otras, tienen su origen en programas o aplicaciones de modelado CAD. Con el tiempo, estos modelos han evolucionado gracias al impulso de la industria, en particular de las industrias automotriz y aeroespacial, y debido a la innovación de ingenieros con un fuerte enfoque en el desarrollo de nuevas técnicas de modelado. De acuerdo con M. Groover (2013) se trata de “una tecnología enfocada al uso de computadoras digitales para llevar a cabo ciertas funciones en diseño y producción”. La gran ventaja de este tipo de programas, y que ha hecho posible el desarrollo de este trabajo, es la adaptación para cambios en escalas, modificaciones del modelo o adecuaciones a las medidas requeridas por el fabricante. Por tanto, el enfoque principal del desarrollo de programas CAD es facilitar la creación de componentes mediante modelos computarizados con elevada repetitividad y baja inversión en prototipos, cambios o desechos. Los ingenieros pueden desarrollar componentes y modelos completos de máquinas o herramientas que, si se produjeran mediante métodos tradicionales de la época industrial, requerirían mayor inversión tanto económica como en tiempo.
Actualmente, para aumentar la precisión y la eficacia en la producción se utilizan softwares avanzados para diseñar componentes, subconjuntos y sistemas de manera integrada. Estos softwares permiten la creación de sistemas complejos con características mecánicas, eléctricas o electrónicas, y el análisis de los componentes y sistemas en función de sus propiedades (Rosamond, 2020; Marchante, 2020). Para el desarrollo del presente trabajo se ha utilizado fabricación aditiva o impresión 3D (Andújar, 2016; 3DSouced,2021; Cubo, 2016; E3D, 2020).
Los avances tecnológicos son innegables (software, impresión 3D, etc.), pero nada habría sido posible sin los “inventores”, figuras históricas que diseñaron utilizando técnicas que hoy en día son usadas por los softwares de diseño asistido. Polímatas como Leonardo da Vinci, Herón de Alejandría y Arquímedes de Siracusa desafiaron las leyes conocidas y crearon mecanismos o estructuras revolucionarias. Las civilizaciones antiguas contaban con instrumentos capaces de lograr precisiones de diseño que habrían sido inimaginables en su tiempo. Los primeros intentos documentados de mecanizar el transporte vertical de agua se remontan al siglo XVI. Sin embargo, se sabe que las civilizaciones antiguas tenían mecanismos capaces de cumplir las funciones requeridas para trabajos de extracción de minerales o de pozo. En cuanto a los sistemas hidráulicos, la civilización minoica destacó en el dominio de técnicas de regadío y otros sistemas como cisternas, pozos, acueductos y manantiales. Matemáticos, arquitectos e ingenieros diseñaron sistemas hidráulicos a gran escala, como el desagüe de Copais, el túnel de abastecimiento de la isla de Samos y el canal de Halis (Argudo, 2019).
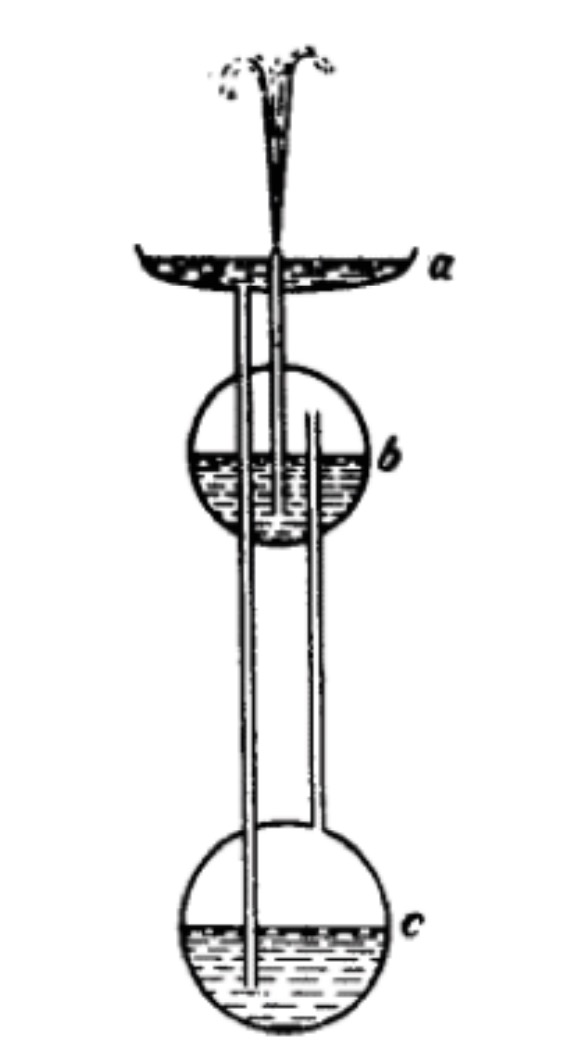
Arquímedes inventó la primera bomba de agua con su ”tornillo de Arquímedes” en el siglo III a.C., aunque ya había sido utilizado por el rey Senaquerib de Asiria cuatro siglos antes. La máquina es un sistema gravimétrico helicoidal que eleva grandes cantidades de agua o materiales (Instrumentos de Medición, 2022). Herón de Alejandría inventó la fuente y la aeolipila, una cámara hueca que se suspende sobre un eje entre dos tuberías verticales y que es la invención precursora de la máquina de vapor. La fuente es el sistema que más se relaciona con un mecanismo de elevación de agua y funciona con presiones de aire y agua, haciendo que el líquido suba por un tubo y salga verticalmente siguiendo el esquema de la figura 1 (OEPM, 2016).
Juanelo Turriano, uno de los mayores ingenieros del Renacimiento español, asesoró a los técnicos e ingenieros del rey en la construcción de presas y canales en la segunda mitad del siglo XVI. Después de concluir sus trabajos, el ingeniero Turriano conocido como el “Arquímedes renacentista”, se trasladó a Castilla-La Mancha y allí creó el artificio de Toledo en 1569, un sistema de elevación de agua basado en el movimiento en balancín. Este sistema consistía en diferentes tubos sujetos en su centro a un eje vertical con un cuenco recolector en un extremo y un orificio de salida en el otro, y se utilizó en una estructura completa que incluía una rueda de cangilones en la primera etapa y las torres de cazos en la segunda. El movimiento del semicírculo superior del artificio de Toledo afectaba al equilibrio del balancín, haciendo que el líquido se desplazara de extremo a extremo, depositando el agua en el siguiente nivel (Lerma et al., 2019).
2. El paternóster romano
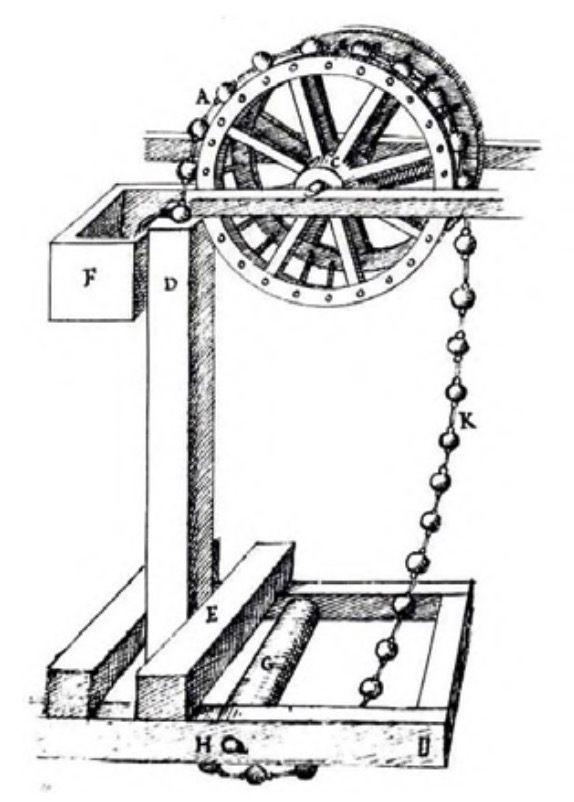
En el siglo XVI se documentan los primeros intentos de mecanización del transporte vertical de agua, pero se sabe que las antiguas civilizaciones contaban con mecanismos para extraer agua en minas inundadas. Así, los romanos utilizaban para la extracción de agua un mecanismo denominado paternóster o patenotre, que tenía una cadena de nudos de cuero o discos de madera. De ahí su similitud con el rosario y la asociación del nombre al sistema. Su descripción se puede encontrar en obras del siglo XVI como De reta metallica libri XII, de Georgii Agricolae (1556), así como en el libro titulado Los veintiún libros de los ingenios y de las máquinas, en el que se detalla su funcionamiento y se hace referencia a su construcción, ilustrando el mecanismo como se muestra en la figura 2 (Lerma et al., 2019; Lastanosa, 1600). El arquitecto, escritor e ingeniero más renombrado del siglo I a.C., Vitruvio, no dejó ningún documento sobre la creación de una máquina como la descrita anteriormente. Sin embargo, hay una gran cantidad de referencias a su trabajo en ese momento (Ortiz y Sanz, 1787). La importante relación que muestra el sistema de rosario o patenotre con una rueda de cadena de cubos, transportando agua a través de una rueda motriz mediante un sistema de cuerdas y enlaces, ha provocado que la gente asuma que Vitruvio fue el creador, sin haber expuesto sus ideas en un escrito conocido.
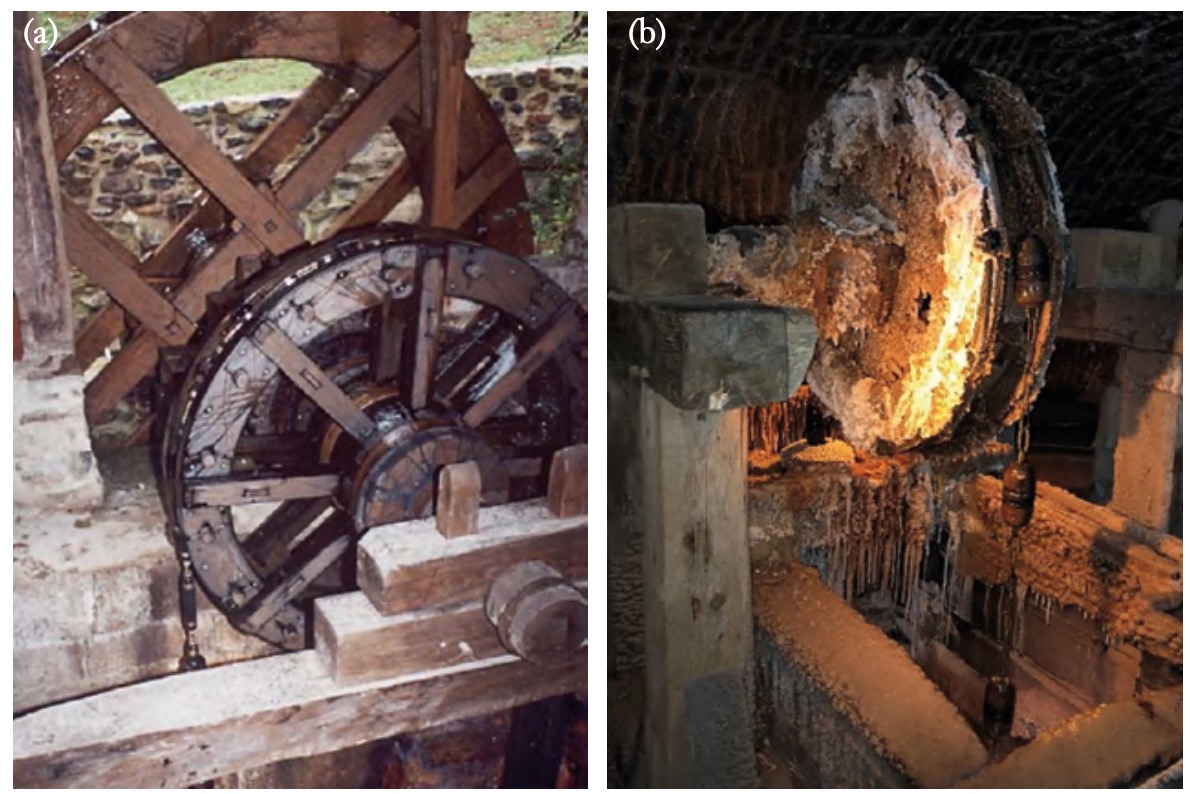
No obstante, la utilización del sistema patenotre en el siglo XVI tuvo un gran impacto en minas y pozos a lo ancho del continente europeo (Ugalde, 2010). El mecanismo era fácil de montar y de manejar, lo que lo convertía en una herramienta valiosa para elevar aguas a profundidades de hasta 60 metros. Los mineros ya no tenían que cargar vasijas de agua ni utilizar poleas con cubetas, sino que contaban con un sistema de bombeo continuo que les permitía desalojar cámaras completas para evitar posibles colapsos debido a la humedad o al peso del líquido. El funcionamiento se basaba en la impermeabilidad entre los nudos o discos de la cadena y el interior del conducto de elevación del líquido. Gracias al sellado con las paredes del tubo, el agua subía con el movimiento circular de la cuerda y quedaba atrapada en las paredes del tubo. Sin embargo, el inconveniente radicaba en la resistencia de los discos en el interior del tubo, lo que reducía la estanqueidad y, por tanto, la eficacia del sistema. Además, se producía corrosión debido al entorno salino en el que se utilizaba. En consecuencia, con el desarrollo de nuevos mecanismos, este sistema fue reemplazado, excepto en algunas minas de sal. En la actualidad, se pueden encontrar máquinas como la descrita anteriormente en el museo de la sal de Leintz Gatzaga en Gipuzkoa, España, (fig. 3a) y en las minas de sal de Wieliczka en Cracovia, Polonia (fig. 3b).
Aunque la maquinaria utilizada en el museo de la sal y en las minas de sal funciona de manera similar y se utiliza para el mismo propósito, su sistema de propulsión es diferente. En el museo, se emplea la fuerza de un río y una rueda que arrastra una cadena para elevar el líquido salino a una altura de ocho metros, mientras que, en las minas, dos trabajadores operan un sistema manual para elevar el agua a una altura de 60 metros. Después de analizar ambos mecanismos, se decidió enfocar el presente estudio en el mecanismo autónomo utilizando la fuerza del río.
3. Modelado 3D
3.1.Vista global
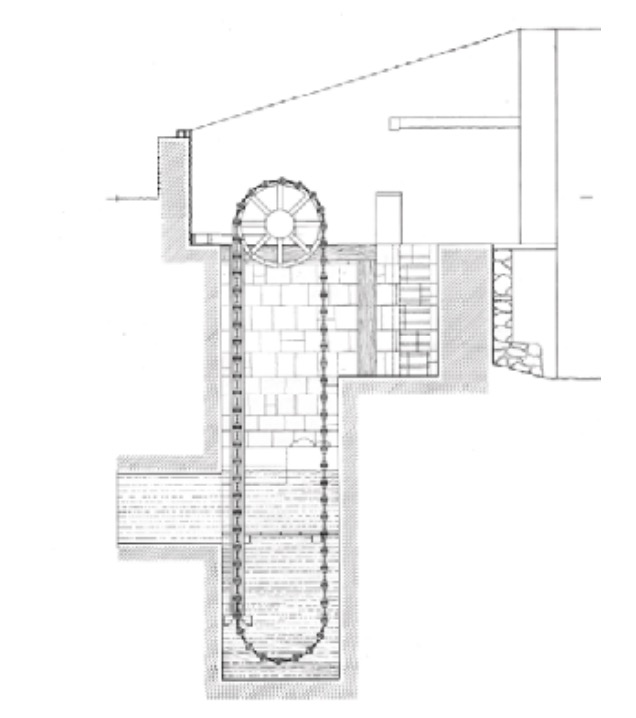
El patenotre romano es un mecanismo hidráulico del que se carece de información precisa sobre sus dimensiones o componentes necesarios para su funcionamiento. A lo largo de los siglos, diversas civilizaciones han incorporado este sistema a otros mecanismos de elevación de agua, y han logrado desarrollar una versión funcional como la presente en Gipuzkoa y Wieliczka. Mediante el análisis de imágenes y la ampliación de fotografías, se han conseguido modelar las diferentes partes del mecanismo, teniendo en cuenta las referencias de Vitrubio sobre el uso de la rueda de agua y la cadena con pletinas. En la figura 4, se muestra un borrador del mecanismo sin dimensiones establecidas (Ugalde, 2010). Para poder asignar unas dimensiones se ha considerado el uso de la rueda hidráulica y la cadena de rosario.
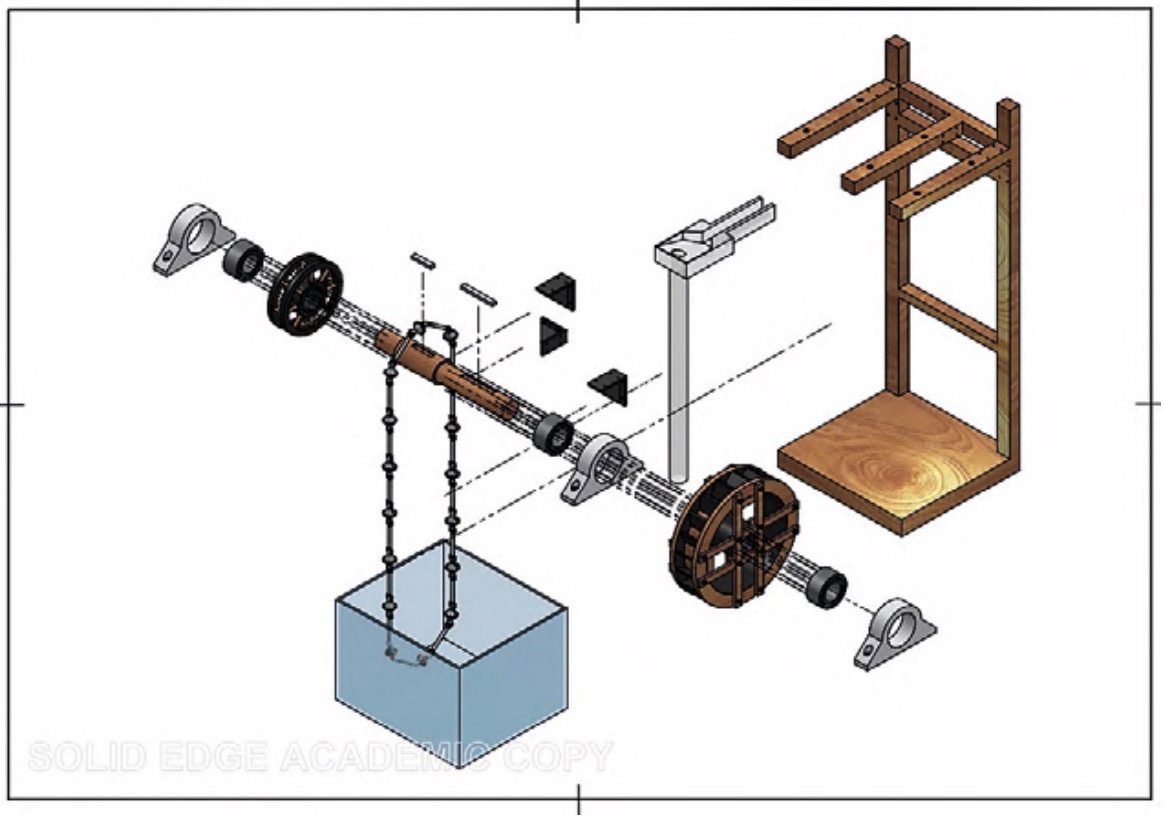
Es un mecanismo de montaje simple, pero la complejidad radica en la cadena que porta los elementos de estanqueidad para arrastrar el agua y que se coloca sobre la rueda tractora. La longitud de esta cadena depende por completo de la altura del sistema sobre el nivel del agua subterránea, lo que afecta directamente al tamaño del tubo colector de agua. Para la realización de este modelo se han tenido en cuenta las dimensiones escaladas del sistema encontrado en Gipuzkoa. En las figuras 5 y 6 se muestra el conjunto del mecanismo y su explosionada, que permiten visualizar todos los componentes que forman parte del sistema.
3.2. Planos de detalle principales
Para analizar el sistema mecánicamente, es necesario examinar los planos detallados de algunos de sus componentes principales. Así pues, es relevante presentar las dimensiones y las cotas de estos planos para poder estudiar el funcionamiento bajo cargas y movimientos una vez que el sistema esté en uso.
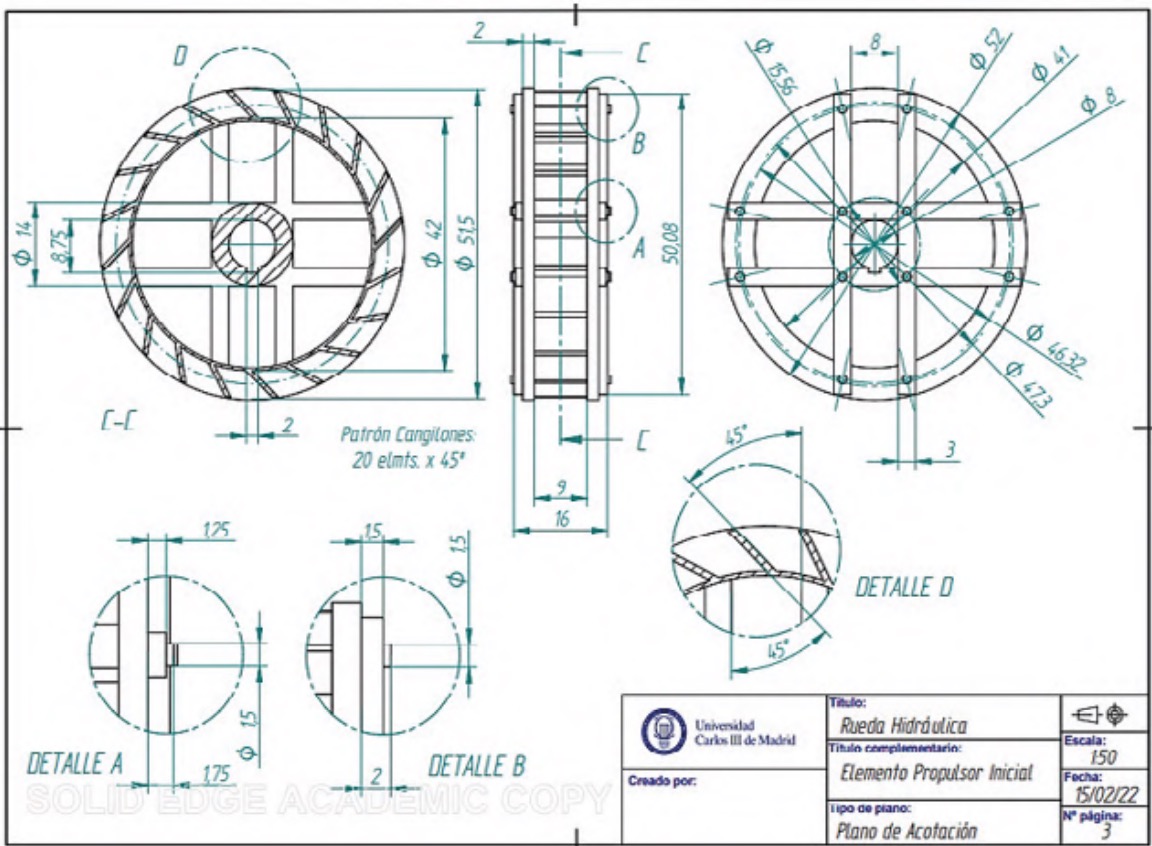
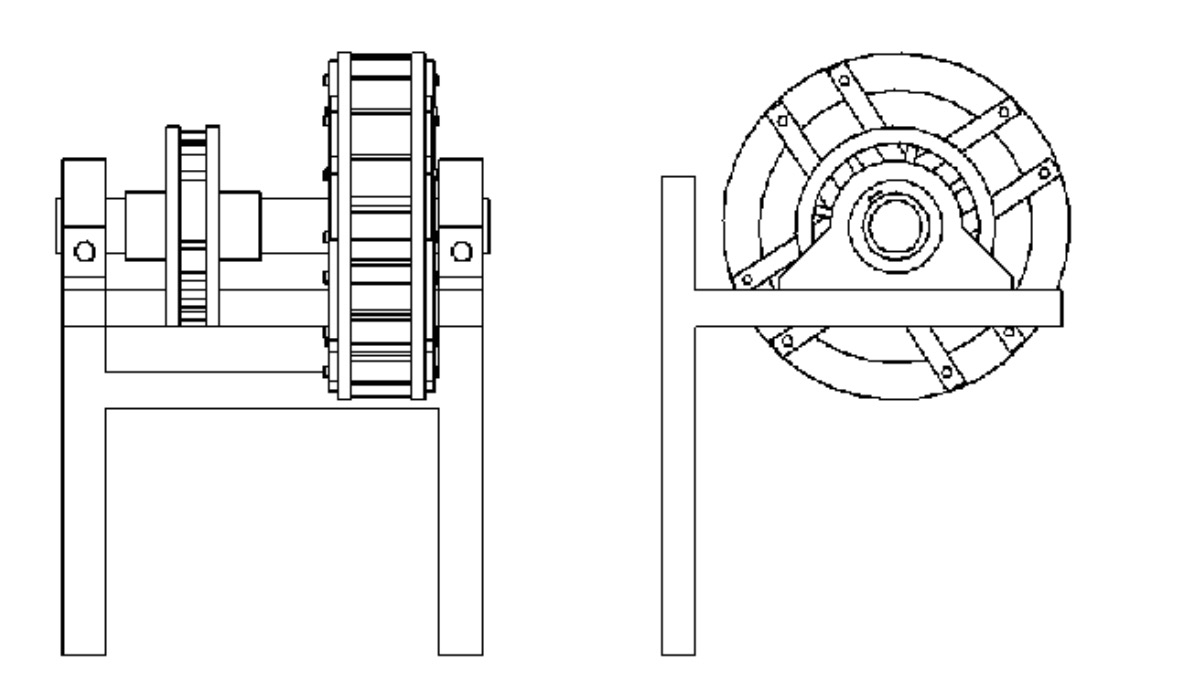
En la figura 7 se muestra el plano detallado de la rueda hidráulica con las dimensiones correspondientes al mecanismo real. El modelo de este componente es fundamental para realizar el análisis de similitud y dimensional que se llevará a cabo posteriormente, ya que las medidas del diseño influirán en los resultados finales. Este elemento consta de 20 paletas que recogen el caudal de un río, generan la fuerza motriz del sistema y permiten que la rueda impulsora eleve el líquido desde el nivel freático inferior. La inclusión de la rueda hidráulica hace que sea un sistema autónomo. Se ha de tener en cuenta que este componente puede ser reemplazado por un sistema de propulsión manual o incluso eléctrico, según las condiciones de uso del mecanismo.
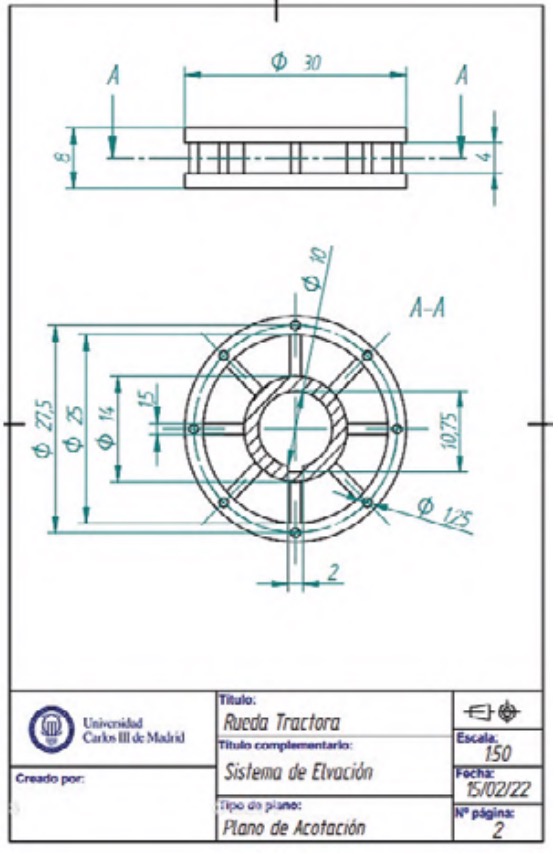
En segundo lugar, se incluye el plano detallado de la rueda impulsora del sistema de elevación de agua ilustrado en la figura 8. El funcionamiento de esta rueda está estrechamente relacionado con el movimiento de la cadena de arrastre del agua y las fuerzas que esta ejerce sobre la rueda.
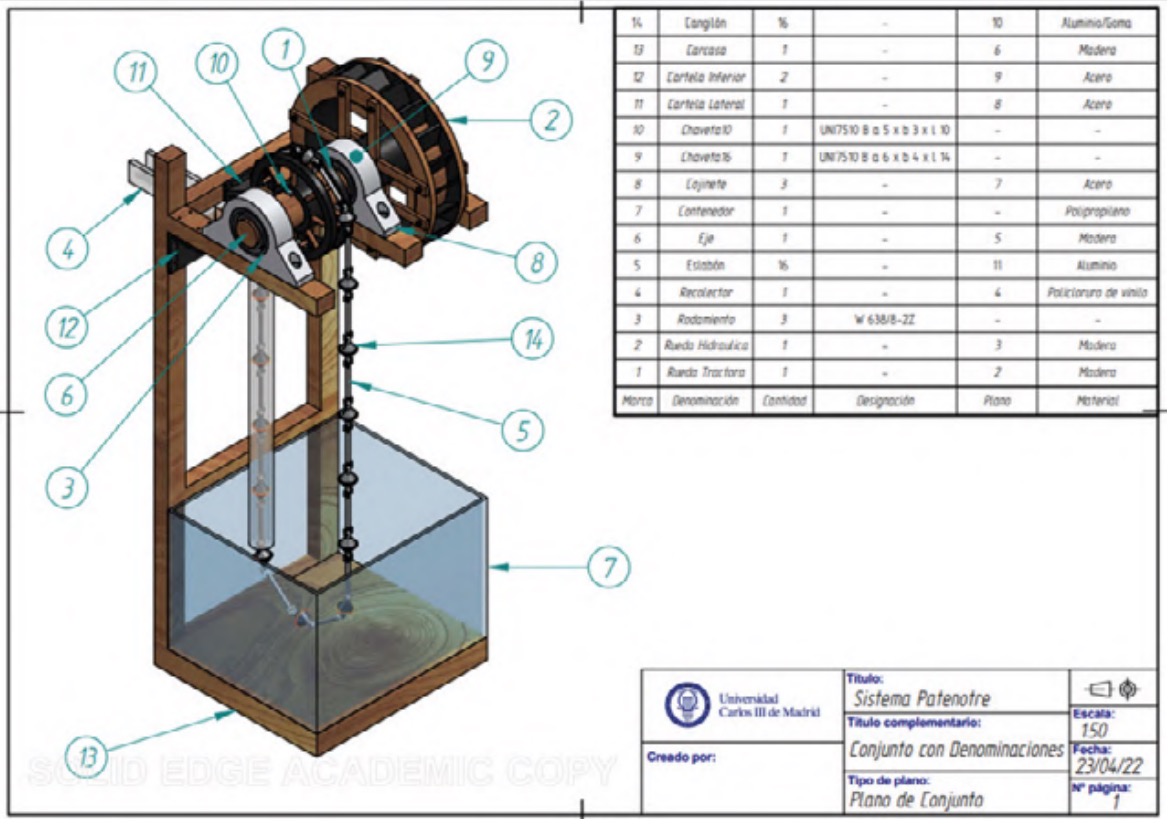
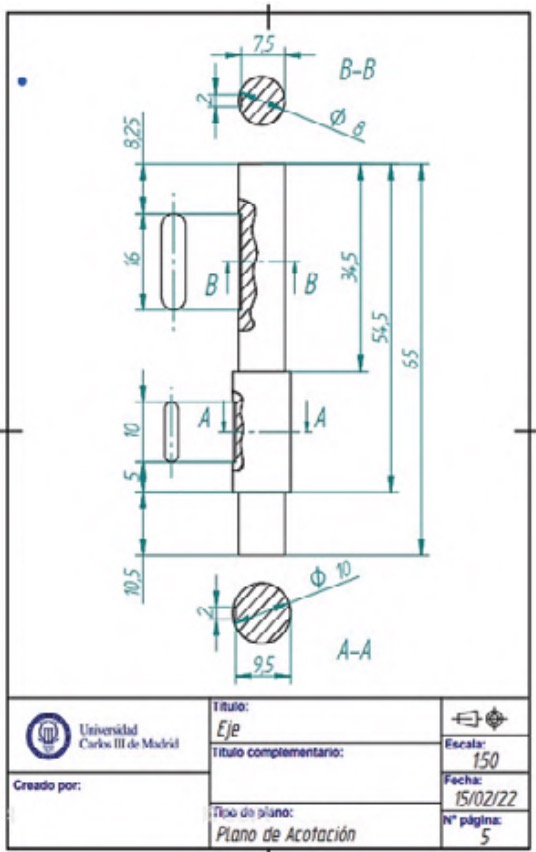
El tercer elemento que analizar es el eje del sistema. Éste será examinado con mayor detalle dado que se deben tener en cuenta las fuerzas generadas por el movimiento de ambas ruedas, que impactan directamente en el rendimiento y la durabilidad del mecanismo. A través de un estudio de fatiga, se podrán conocer las condiciones de trabajo a las que el modelo podrá ser sometido. En la Figura 9 se presentan las dimensiones del eje, prestando especial atención a los cambios de diámetro y a los puntos de concentración de tensiones, como los chaveteros. Mediante el análisis de las fuerzas incidentes o provocadas por las ruedas impulsora e hidráulica, así como los puntos de apoyo en los cojinetes, será posible evaluar la vida útil del eje y los coeficientes de seguridad con los que podrá operar.
3.3. Maquetado
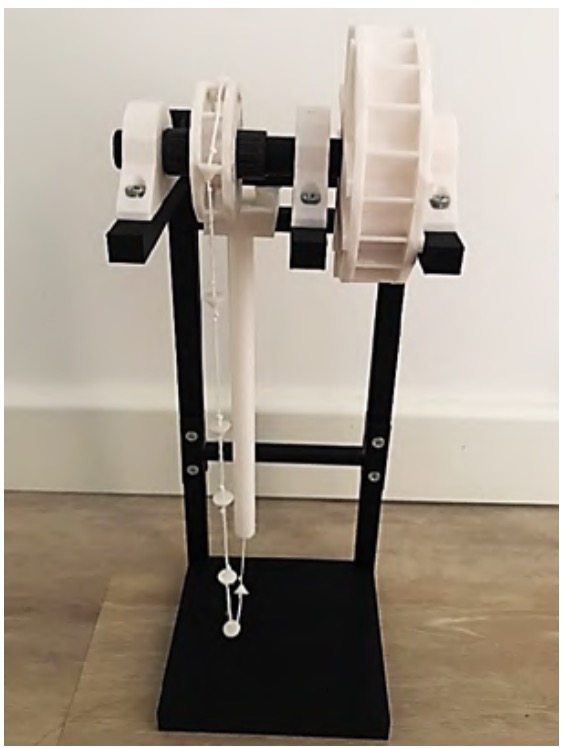
Una vez completado el diseño del modelo utilizando el software Solid Edge, se procede a su impresión 3D, como se muestra en la figura 10. Para la fabricación de las piezas del sistema, se utilizó filamento PLA (ácido poliláctico) como material de trabajo. Esto permitió obtener un modelo a escala del paternóster.
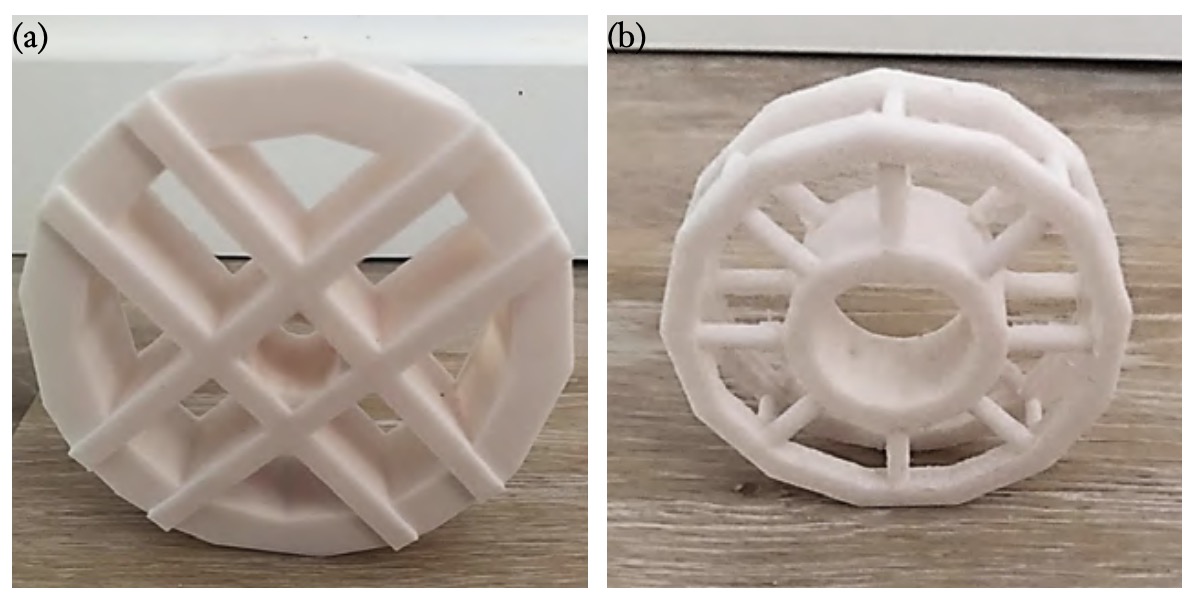
En la figura 11 se muestra el detalle de la impresión 3D de las dos ruedas del sistema.
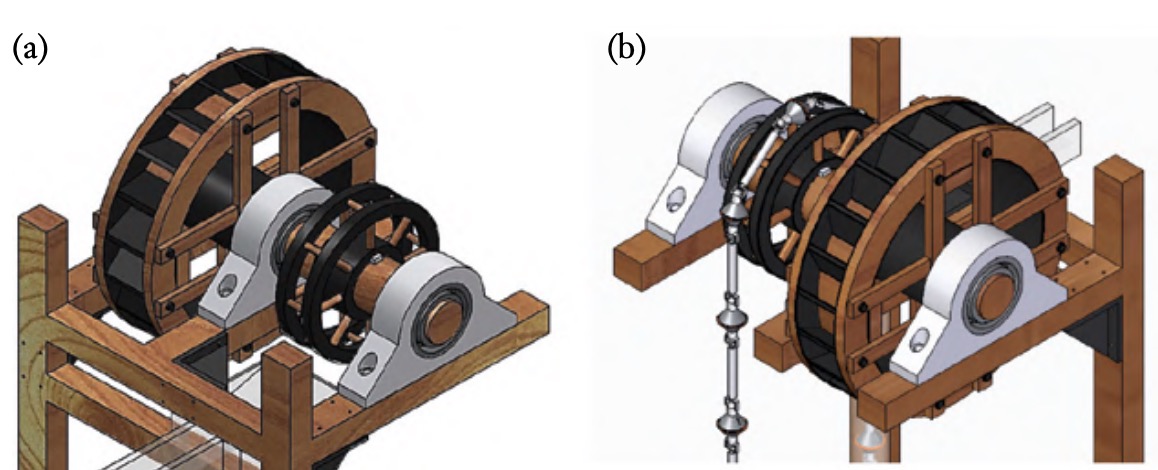
A continuación, se incluye detalle del ensamblaje de la parte superior del conjunto con y sin cadena (fig. 12).
4. Hipótesis de estudio
Un mecanismo propulsado de manera manual, tomando como referencia las indicaciones de la máquina presente en Wieliczka, requeriría de un esfuerzo energético aproximado de 803 kJ/d, cifra realista suponiendo que un operario que trabaja 8 horas diarias puede generar una potencia media de 47 W, lo que se traduce en 1.354 kJ/d. En el caso opuesto, en el que el mecanismo funciona de manera autónoma, como el de Gipuzkoa, la rueda hidráulica debe proporcionar el mismo empuje que el operario para mantener el caudal de elevación en condiciones similares (Ugalde, 2010). En la figura 13, se incluye el modelo de estudio.
4.1. Diseño fundamental
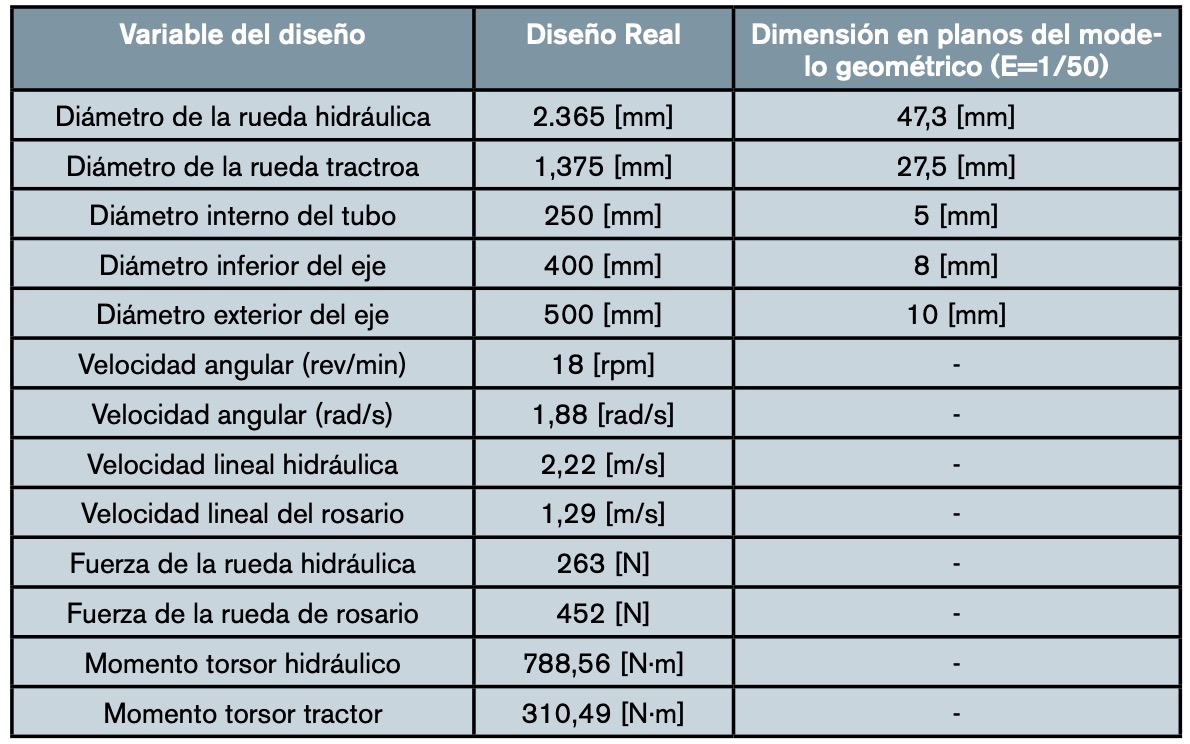
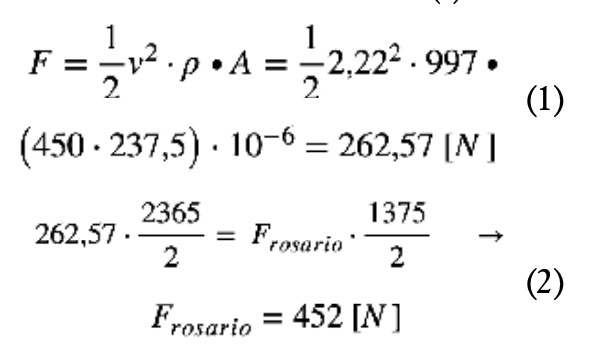
Para realizar el análisis del mecanismo, se utilizarán como referencia las dimensiones presentadas en la tabla 1. Estas dimensiones servirán como base para asociar las nuevas condiciones de trabajo al modelo a escala. La fuente de energía que pone en funcionamiento el mecanismo es la energía hidráulica de una corriente de agua que incide con una velocidad de 2,22 m/s sobre la rueda hidráulica, lo que le confiere una velocidad angular de 1,88 rad/s. Mediante la aplicación de la ecuación de Bernoulli (1), se obtiene la fuerza de empuje, que, al multiplicarse por el radio de la rueda, resulta en un par motor de 311 Nm. Como resultado, el mecanismo puede ponerse en marcha, y es el par motor el responsable de mover la rueda y torsionar el eje, con una resistencia equivalente en la zona del rosario del mismo valor (2).
 El estado tensional refleja que las fuerzas de rosario e hidráulica generan tensiones normales alternantes, mientras que el torsor genera tensiones cortantes medias.
El estado tensional refleja que las fuerzas de rosario e hidráulica generan tensiones normales alternantes, mientras que el torsor genera tensiones cortantes medias.
Teniendo en cuenta los datos proporcionados y siguiendo el método de análisis por semejanza mecánica, se van a determinar las principales variables de funcionamiento de una maqueta a escala. Las variables de velocidades, tanto angulares como lineales, caudales, fuerzas y momentos serán recalculadas bajo condiciones semejantes de uso en la maqueta diseñada. Dado que el estudio se realizará sobre el modelo autónomo, propulsado por la rueda hidráulica, todo se relacionará con su movimiento y el empuje que esta pueda tener, controlando el caudal de entrada a la maqueta.
5. Semejanza
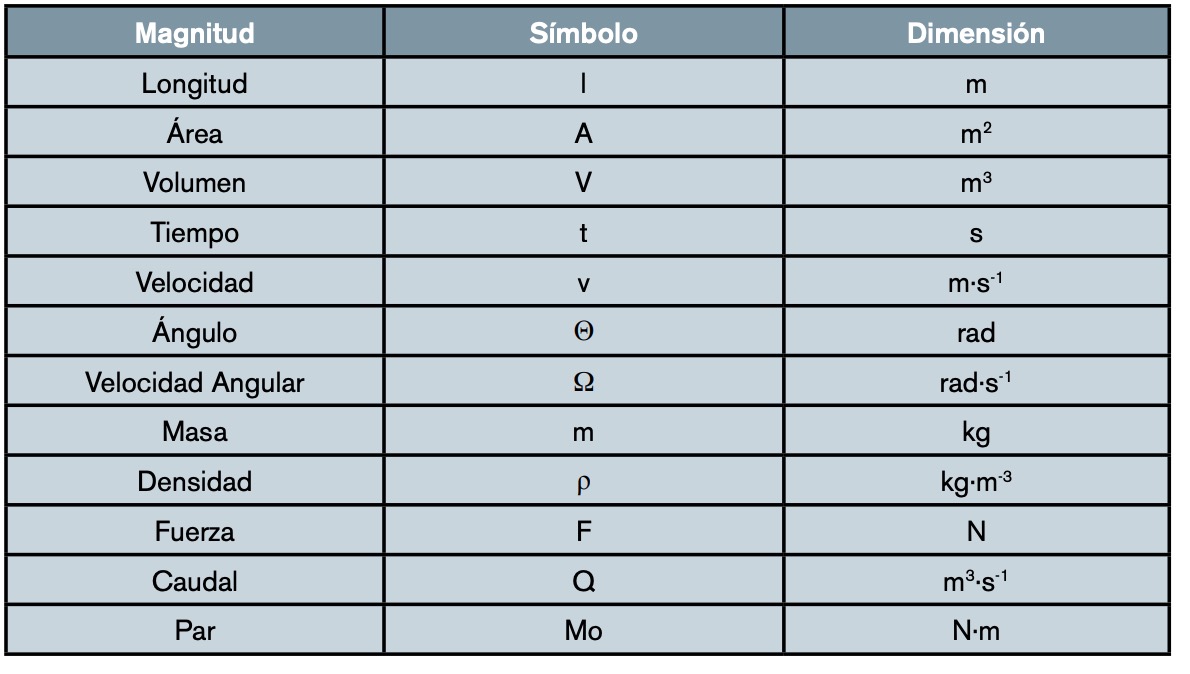
El concepto de semejanza mecánica implica evaluar un modelo con el objetivo de adaptar las condiciones de uso a un prototipo que sea más fácil de analizar y estudiar. Esto permite a los ingenieros probar sus creaciones en condiciones similares a las que los sistemas reales experimentarán. Para lograrlo, es necesario comprender las unidades de medida básicas que formarán el núcleo de las ecuaciones dimensionales utilizadas para expresar aspectos mecánicos del estudio. Estas magnitudes se aplican posteriormente y se resuelven para obtener resultados aplicables a modelos reales. Se utiliza el metro (L) como unidad de longitud, el segundo (T) como unidad de tiempo y el kilogramo (M) como unidad de masa, que son todas unidades fundamentales de medida, y se relacionan con las magnitudes básicas del problema de estudio, como se muestra en la tabla 2.
Para realizar el análisis del sistema de paternóster, utilizando la semejanza mecánica en el modelo en cuestión, es necesario considerar las dimensiones indicadas en la tabla 2, ya que la relación geométrica será de gran importancia en este estudio. Para ello, se establece la semejanza geométrica comparando las dimensiones de la maqueta con las del sistema real, como se muestra a continuación:
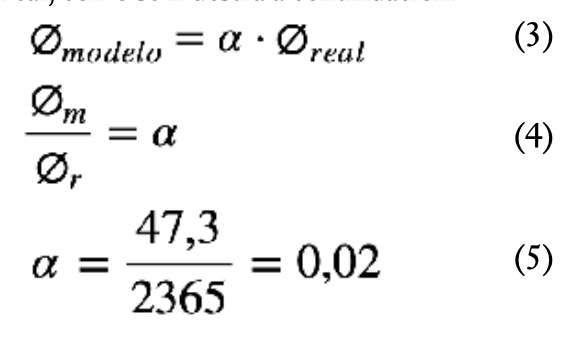 En este caso, el factor toma un valor de 0,02, lo que se puede interpretar como una escala de 1:50, sabiendo que el maquetado tendrá las dimensiones expresadas en los planos de diseño, mientras que el modelo real trabajará en condiciones semejantes.
En este caso, el factor toma un valor de 0,02, lo que se puede interpretar como una escala de 1:50, sabiendo que el maquetado tendrá las dimensiones expresadas en los planos de diseño, mientras que el modelo real trabajará en condiciones semejantes.
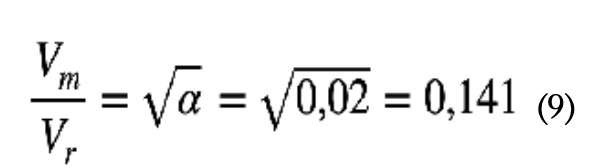
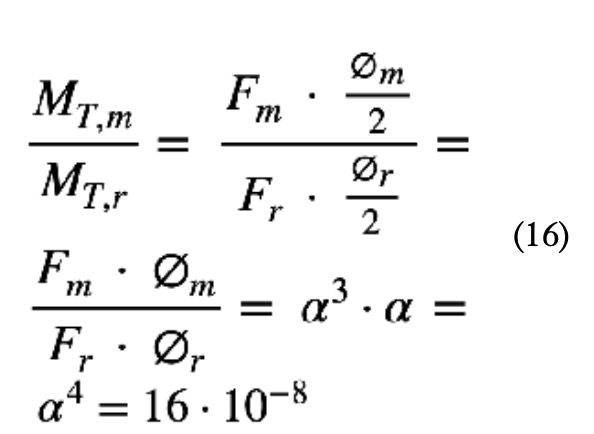
Establecida la semejanza geométrica del sistema, se procede a analizar su semejanza cinemática en términos de velocidades de trabajo. En este análisis, se relacionan las variables conocidas en condiciones reales y, utilizando la semejanza geométrica previamente establecida, se obtienen las condiciones de trabajo en el modelo a escala. Es decir, la relación fundamental entre las variables se basa principalmente en la relación geométrica entre el modelo y el sistema real. En el contexto del análisis cinemático, se consideran los números de Reynolds y Froude, y este último es el utilizado para resolver el problema en cuestión.
El número de Froude (ecuación 6) considera la velocidad del fluido (V), la gravedad (g) y la profundidad hidráulica de trabajo (Y). Para la obtención de la velocidad, se iguala el número de Froude del modelo con el sistema real, despejando el cociente de velocidades.
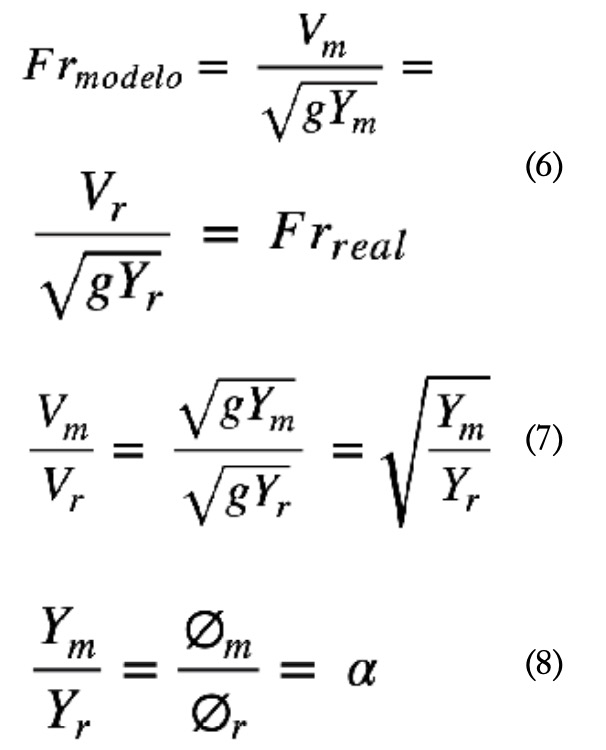
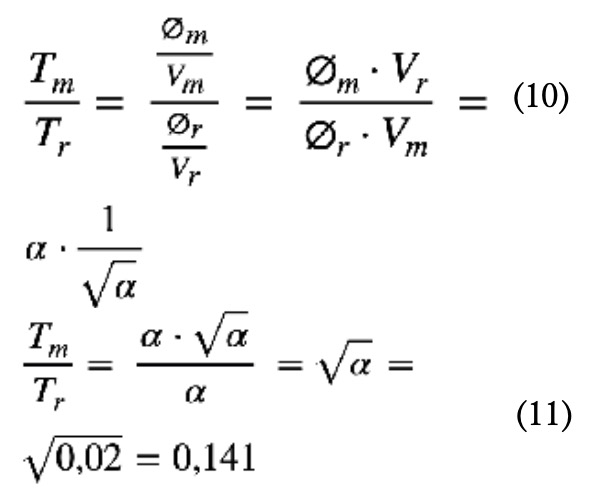
 A partir de la velocidad se puede establecer el factor de tiempo, que se determina a partir de la distancia y la velocidad de trabajo de modelo y sistema real.
A partir de la velocidad se puede establecer el factor de tiempo, que se determina a partir de la distancia y la velocidad de trabajo de modelo y sistema real.
 La semejanza cinemática se logra cuando se cumple la semejanza geométrica, lo que permite alcanzar la semejanza dinámica. Esta última depende de las dos anteriores, así como del sistema de fuerzas que actúa sobre el mecanismo, dimensionadas de acuerdo con el problema actual. En el estudio, se presta especial atención a la fuerza hidrostática en la superficie de contacto, y posteriormente se igualan las fuerzas en el modelo y en el sistema real para obtener las relaciones necesarias. Estas fuerzas dependerán de la densidad del fluido (?), la distancia al centro de presión (hcg), el área (A) y la gravedad (g). Son las ecuaciones 12-15.
La semejanza cinemática se logra cuando se cumple la semejanza geométrica, lo que permite alcanzar la semejanza dinámica. Esta última depende de las dos anteriores, así como del sistema de fuerzas que actúa sobre el mecanismo, dimensionadas de acuerdo con el problema actual. En el estudio, se presta especial atención a la fuerza hidrostática en la superficie de contacto, y posteriormente se igualan las fuerzas en el modelo y en el sistema real para obtener las relaciones necesarias. Estas fuerzas dependerán de la densidad del fluido (?), la distancia al centro de presión (hcg), el área (A) y la gravedad (g). Son las ecuaciones 12-15.
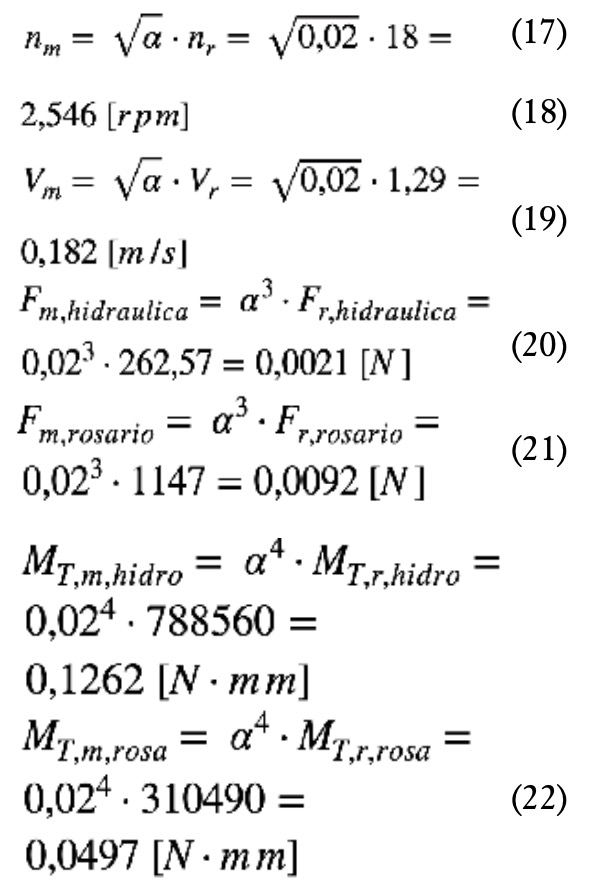
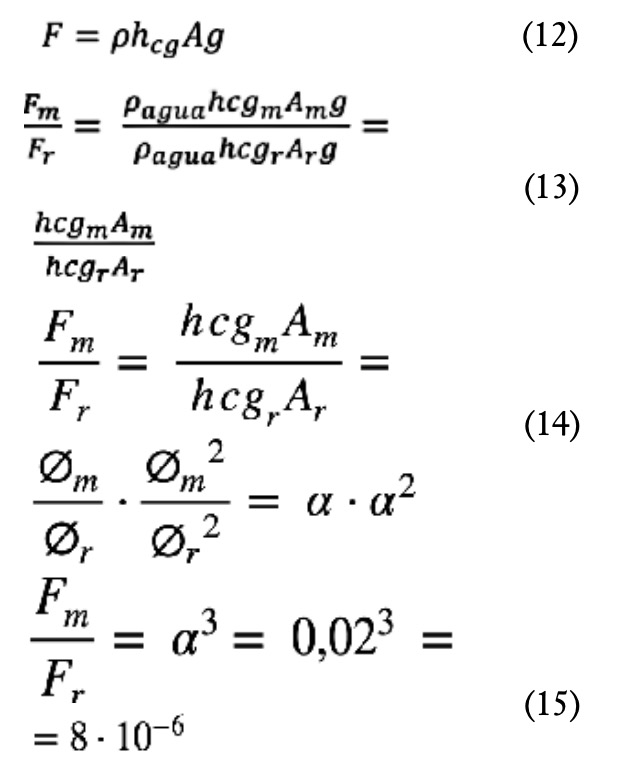 De la misma forma, se puede asignar el momento torsor provocado por las fuerzas hidráulica y tractora sobre el eje (ecuación 16), sabiendo que dicho momento es resultante de la fuerza (F) por la distancia, en este caso el radio (R).
De la misma forma, se puede asignar el momento torsor provocado por las fuerzas hidráulica y tractora sobre el eje (ecuación 16), sabiendo que dicho momento es resultante de la fuerza (F) por la distancia, en este caso el radio (R).
 Una vez conocidos los factores geométricos, cinemáticos y dinámicos, se puede solucionar el problema para condiciones de trabajo del modelo. Es decir, aplicando las semejanzas halladas, se obtendrán las velocidades de trabajo, al igual que las fuerzas ejercidas sobre las ruedas del sistema, traducidas al eje de movimiento, y los momentos torsores que estas generan.
Una vez conocidos los factores geométricos, cinemáticos y dinámicos, se puede solucionar el problema para condiciones de trabajo del modelo. Es decir, aplicando las semejanzas halladas, se obtendrán las velocidades de trabajo, al igual que las fuerzas ejercidas sobre las ruedas del sistema, traducidas al eje de movimiento, y los momentos torsores que estas generan.
 6. Conclusiones
6. Conclusiones
Los sistemas de elevación de agua de la antigüedad continúan en uso hoy en día debido a que son mecanismos robustos, con gran adaptabilidad al entorno en el que trabajaban. Su función era facilitar las tareas humanas reduciendo la carga que un operario debería soportar e incluso eliminar el trabajo humano y hacer uso únicamente de energías naturales, como la hidráulica en el caso de las norias y ruedas hidráulicas.
En el presente estudio se han recuperado los planos de un sistema de elevación de agua de la época romana, denominado paternóster. Se trata de un sistema sencillo y muy original que servía para evacuar agua de las minas. El sistema se ha analizado mecánicamente modelando todos sus componentes y obteniendo los planos de fabricación. Posteriormente, mediante fabricación aditiva, se ha obtenido una maqueta del sistema. Además, se han calculado por semejanza mecánica las condiciones de funcionamiento que tendría la maqueta.
El uso de la fabricación aditiva, en unión al modelado tridimensional del sistema, reduce los costes de construcción, dado que se puede utilizar materiales adaptables a las condiciones de ensayo. Es decir, según los requerimientos del prototipo, este se puede imprimir en materiales reciclados o de precios bajos y realizar el análisis necesario sobre él sin aumentar los costes provenientes de aplicar materiales con mayores precios de adquisición. Dependiendo del uso final que tenga la maqueta, esta podrá ser impresa a escala, con materiales económicos y luego reciclada para abaratar costes de diseño en el proyecto.
Finalmente, el estudio de mecanismos bajo semejanza mecánica reduce la necesidad de construir sistemas a escala real con poca certeza de su viabilidad o funcionamiento. Al realizar un estudio mecánico con un sistema semejante, se obtienen resultados con mucha precisión, que pueden ser traducidos a las condiciones de trabajo en las que el sistema real se encontrará. De esta forma, el equipo técnico puede contar con mayor certeza en la viabilidad del proyecto.
Referencias
3DSourced (2021). The Complete History of 3D Printing: From 1980 to 2022. Disponible en: https://www.3dsourced. com/guides/history-of-3d-printing/ (consultado el 5 de marzo de 2022).
Agricolae G (1556). De re metallica libri XII. Basileae.
Andújar B (2016). Amizar Alcor Grupo Additive Manufacturing. ¿Qué es la fabricación aditiva? Disponible en: https://mizaradditive.com/que-es-fabricacion-aditiva/ (consultado el 28 de febrero de 2022).
Argudo García JJ (2019). iaqua, Grecia o el origen de la ingeniería. Disponible en: https://www.iagua.es/blogs/juan-jose-argudo-garcia/gestion-agua-distintas-civilizaciones-grecia-actualidad-ii. (Consultado el 5 de marzo de 2022).
Cubo N (2016). Aquae Fundación. Bioprinting: imprimiendo tejidos humanos. Disponible en: https://www.fundacionaquae.org/bioprinting-imprimiendo-tejidos-humanos/ (consultado el 10 de marzo de 2022).
E3D (2020). Never Forget Your Roots: A Brief History of RepRap. Disponible en: https://e3d-online.com/blogs/news/ history-of-reprap (consultado el 3 de marzo de 2022).
Groover MP (2013). CAD/CAM: Computer-aided design and manufacturing, Pearson Education. ISBN 8177584162.
Instrumentos de Medición (2022). Tornillo de Arquímedes: Qué es, características y funcionamiento. Disponible en: https:// instrumentosdemedicion.org/general/ tornillo-de-arquimedes/ (consultado el 10 de marzo de 2022).
Jaycon Systems (2022). Exporting 3D files: stl vs. obj vs. iges vs. step. Disponible en: https://jayconsystems.com (consultado el 1 de marzo de 2022).
Landes DS (1997). MIT Lincoln Laboratory: Technology in the National Interest. ISIS A Journal of the History of Science Society. Vol. 88, Number 2. E.C. Freeman, Ed.
Lastanosa PJ d (1600). Los veinte y un libros de los yngenios, y máquinas de Juanelo Turriano.
Lerma R, Álvaro L (2019). El ingenio de Juanelo Turriano. Técnica Industrial 322: 92-94.
Marchante A (2020). 3Dnatives. CATIA, el software que trasciende la tecnología de diseño CAD. Disponible en: https:// www.3dnatives.com/es/catia-software-tecnologia-cad-080720202/#! (consultado el 9 de febrero de 2022).
Marchante A (2020). 3Dnatives. Solid Edge, ¿qué características tiene esta solución de modelado 3D?. Disponible en: https://www.3dnatives.com/es/solid-edge-solucion-modelado-021120202/#! (consultado el 19 de febrero de 2022).
Oficina Española de Patentes y Marcas, y Universidad Autónoma de Madrid (2016). Herón de Alejandría.
Oficina Española de Patentes y Marcas, y Universidad Autónoma de Madrid (2016). Herón de Alejandría. Disponible en: http://historico.oepm.es/museovirtual/galerias_tematicas.php?tipo=INVENTOR&xml=Her%C3%B3n%20 de%20Alejandr%C3%ADa.xml (consultado el 3 de marzo de 2022).
Ortiz y Sanz JF (1787). Los diez libros de arquitectura de M. Vitruvio Poleón. Imprenta Real, Madrid.
Rosamond Z. (2020). All3DP (All About 3D Printing). What Is SolidWorks? – Simply Explained. Disponible en: https://all3dp.com/2/what-is-solidworks-simply-explained (consultado el 26 de febrero de 2022).
Ugalde T (2010). Máquinas de elevación de agua en la minería romana. Traianvs. 2010: 327-345.