

Análisis de un regulador proporcional integral a partir de criterios heurísticos
Analysis of a proportional integral regulator from heuristic criteria
RESUMEN
El presente artículo trata de enfocar el funcionamiento de un regulador proporcional integral (PI), que se utiliza en todos los lazos de control de un enlace en corriente continua que une dos áreas de energía para evitar las restricciones que ambas áreas tienen si el enlace fuese exclusivamente en corriente alterna. Las entradas que a dicho regulador pudieran llegar serán tratadas y utilizadas no como parámetros deterministas, sino como parámetros difusos. Por ello, en este escrito se explican las reglas elementales del álgebra difusa para la comprensión del mismo. En el pensamiento científico tradicional, la comprensión de un fenómeno se mide por la capacidad de analizarlo en términos cuantitativos. Sin embargo, a medida que la complejidad crece, disminuye la posibilidad de hacerlo en los mismos términos, es decir, ya no es posible hacer afirmaciones precisas y significativas sobre su comportamiento. Esta imprecisión dio origen al control fuzzy o control difuso. Su premisa se basa en que los elementos claves del razonamiento humano no son precisamente elementos exactos, sino conceptos imprecisos, de ahí su nombre. La capacidad del cerebro humano es tal que no solo puede trabajar en términos cuantitativos, sino también cualitativos.
Recibido: 29 de julio de 2013
Aceptado: 2 de enero de 2014
Palabras clave
Lógica difusa, motor de interferencia, lazo de control, reguladores PI.
ABSTRACT
This paper attempts to approach the performance of a PI controller, which is used in all control loops of a DC link connecting two areas of energy to avoid both have restrictions if the link were exclusively on AC power. The inputs that could arrive to that controller will be treated as deterministic parameters but fuzzy parameters. Therefore, in this paper the basic rules of fuzzy algebra are explained to understand it. In traditional scientific thinking, understanding of a phenomenon is measured by the ability to analyze it in quantitative terms. However, as the complexity increases, decreases the possibility of doing it in the same terms decreases. That is to say, it is not possible to make precise and significant statements about its behaviour. This imprecision led to fuzzy control. Its premise is based on that the key elements of human reasoning are not exactly accurate but imprecise concepts, hence its name. The ability of the human brain is such that it cannot only work in quantitative terms but also in qualitative.
Recived: July 29, 2013 Accepted: January 2, 2014
Keywords
Fuzzy logic, interference engine, control loop, PI regulators.
Introducción
La caracterización de un conjunto fuzzy es una extensión del conjunto clásico, de manera que si X es el universo de discusión y sus elementos se asignan por x, entonces un conjunto fuzzy de X es definido como un par ordenado.
A = {x, μA(x)/x∈X}
Donde μA(x) se denomina grado de pertenencia ó función miembro de x en A.
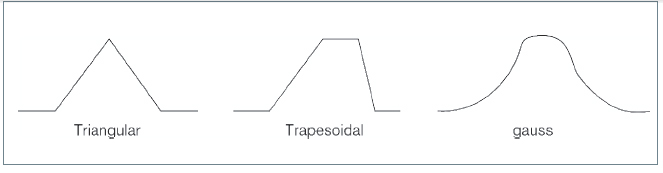
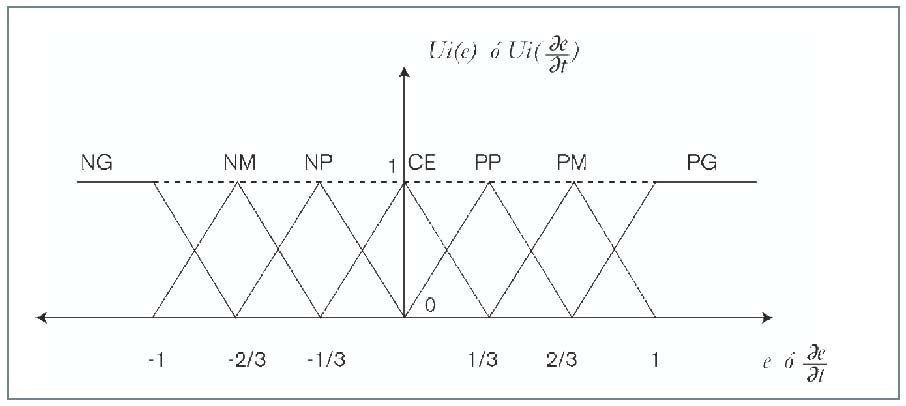
Cada elemento de x se mapea a un valor comprendido entre 0 y 1. Existen varias curvas o formas de mapeo. La intuición heurística sugiere las formas de la figura 1.
Se puede concluir que los conjuntos fuzzy describen conceptos vagos (más rápido, muy alto, más caliente, etcétera). Un conjunto fuzzy admite que un elemento pertenezca parcialmente a él.
Ventajas del control fuzzy
– Es amigable en su concepción y diseño.
– No necesita sintonizarse para distintos puntos de operación como ocurre con el PI.
– Funciona adecuadamente en un amplio rango de operación.
– Permite abordar fácilmente los imprevistos.
Desventajas del control fuzzy
– No existe criterio definido para seleccionar los conjuntos fuzzy.
– Tampoco existe un criterio para atribuir formas de onda a las funciones de pertenencias.
– No hay un criterio para asignar el grado de traslape.
– La formación de la tabla es subjetiva.
– No existe un procedimiento sistemático para el diseño de controladores fuzzy.
– Se requiere bastante consumo de tiempo en pruebas y errores finales.
– El software es más grande que su contraparte PI.
Aplicación
Fusificación
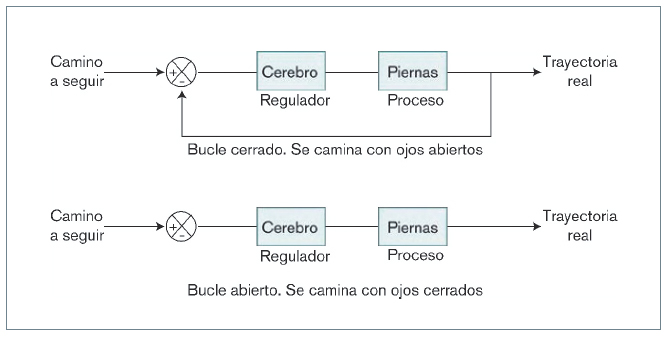
Se parte de que un sistema o cualquier otro sistema podría funcionar como ocurre cuando se camina. Si se hace con los ojos cerrados, se está ante un lazo de control abierto, ya que no se rectifica la trayectoria en caso de desvío. Sin embargo, si se hace con los ojos abiertos se puede rectificar la trayectoria en caso de desvío y, por tanto, será un lazo cerrado (figura 2).
Lo que se pretende vislumbrar entonces es cómo puede decidir un regulador en el bucle cerrado para corregir el error de la misma manera que si lo hiciese un cerebro, es decir, usando lógica difusa.
Este apartado intentará hacer ver cómo un regulador PI funciona desde el prisma del control fuzzy (Universidad de Málaga, 2013). A este tipo de lógica de actuación se le llama lógica heurística o lógica difusa y trata sobre las reglas que dirigen la toma de decisiones.
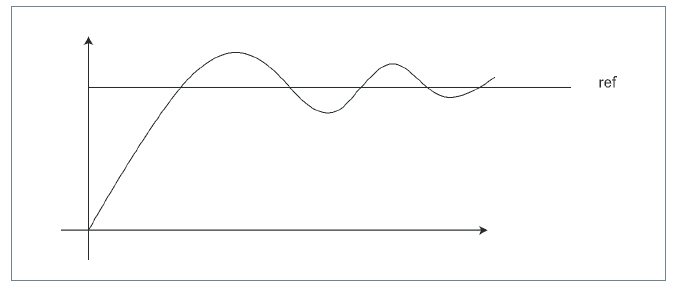
Aplicando la simulación de un control PI mediante control heurístico se sabe que un regulador PI funciona junto a un proceso de primer orden en un lazo de control cerrado (figura 3).
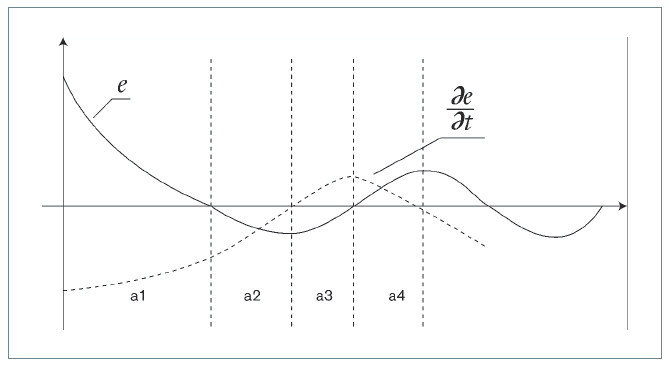
Se divide la señal en zonas, de acuerdo con el error y la derivada del error, tal como se muestra en las figuras 4 y 5.
Analizando las dos figuras últimas, se puede deducir lo siguiente:
1) Si e(t) y de(t)/dt son cero, entonces se mantendrá el control constante y se anota como ∆U=∅(no varía la tensión de salida del PI –no hay señal a la salida del PI hacia el proceso– para corregir el error).
2a) Si e(t) tiende a cero con velocidad aceptable, se mantendrá el control ∆U=∅(no se añade ni se quita tensión de salida del PI hacia el proceso para corregir el error). Se está en zona a1 y a3.
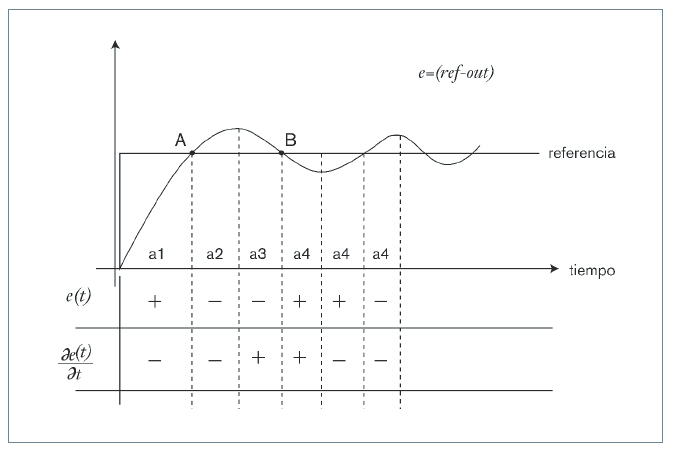
2b) Si e(t) tiene la misma intensidad que su tendencia, entonces ∆U=∅
3) Si e(t) no está tendiendo a cero, la acción de control dependerá del signo y magnitud de e(t) y (de(t))/dt. En zona a2 ∆U < 0 se reduce tensión y en zona a4 ∆U > 0, se añade tensión.
De la gráfica del error y derivada última, puede verse que la caracterización de zonas o sectores es:
a1 = {e> 0,de/dt< 0}
a2 = {e < 0, de/dt<0}
a3 = {e < 0, de/dt>0}
a4 = {e > 0, de/dt>0}
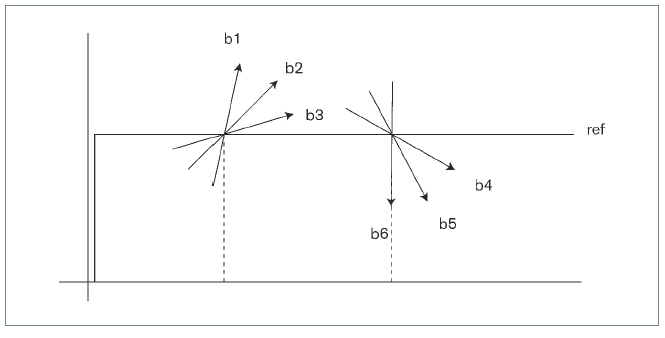
Las alternativas de las pendientes en los puntos A y B se pueden ver en la figura 6.
La caracterización en función de velocidad y sentido es la siguiente:
b1 = {e = 0, de/dt<<< 0}
b2 = {e = 0, de/dt<< 0}
b3 ={e=0, de/dt<0}
b4 = {e = 0, de/dt>0}
b5 = {e = 0, de/dt>> 0}
b6 = {e = 0, de/dt>>> 0}
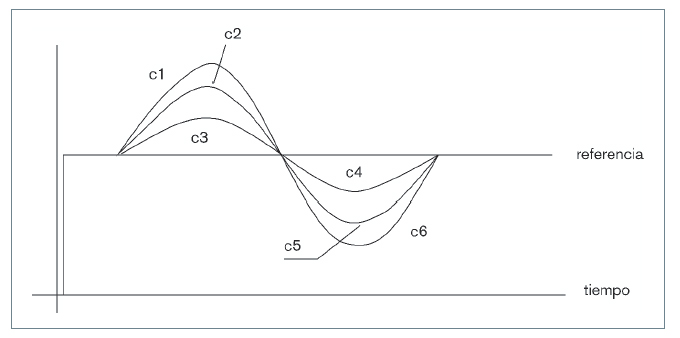
c1 = { de/dt≠ 0, e <<<0}
c2 = { de/dt≠ 0, e <<0}
c3 = { de/dt≠ 0, e <0}
c4 = { de/dt≠ 0, e >0}
c5 = { de/dt≠ 0, e >>0}
c6 = { de/dt≠ 0, e >>>0}
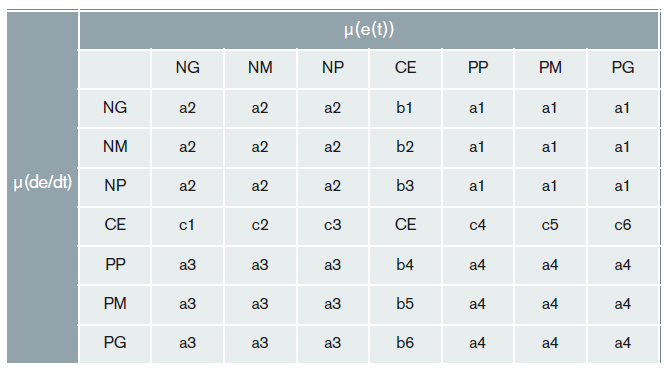
De este análisis empírico se podrán interpretar los ai, bi y ci {∀i∈[1,6]} como rasgos heurísticos, lo cual da origen a variables difusas definidas para una función de pertenencia μ(e) y otra μ(de(t)/dt). Sean estas variables difusas:
NG: negativo grande
NM: negativo mediano
NP: negativo pequeño
CE: cero
PP: positivo pequeño
PM: positivo mediano
PG: positivo grande
El encasillamiento de variables de ingeniería a heurísticas se llama fuzificación.
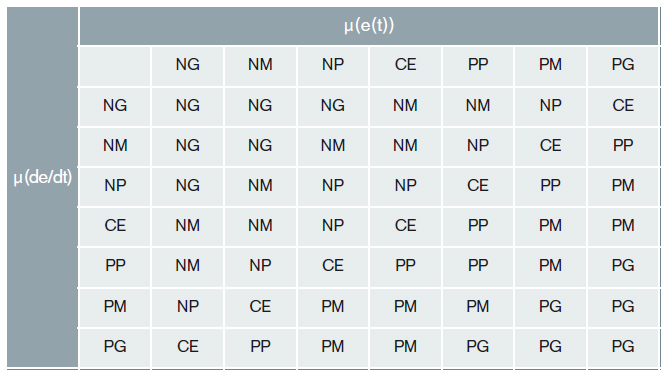
En la matriz de la tabla 1 se representan las funciones de pertenencia del error, y la derivada puede ser de acuerdo a las figuras 4 y 5.
Así, se pueden construir los estados de la acción de control (motor de interferencia) en función de las intersecciones que existen en los valores difusos de las funciones de pertenencia �. Esto es, que se pretende saber qué acción debe
Análisis de un regulador proporcional integral a partir de criterios heurísticos
tomarse si, por ejemplo, la función de pertenencia del error (μ(e(t))) tiene un valor difuso de PG (positivo grande) y, a la vez, la función de pertenencia de la tendencia del error (μ(de/dt)) tiene un valor difuso de PM (positivo mediano).
Para responder a esto se define la siguiente álgebra, que se agrupará en los siguientes casos:
Caso 1 (zona de la tabla 1, acciones agrupadas como a4)
(μ(e(t)) ∩(μ(de/dt)) ⇒La acción que se debe tomar es la inmediatamente superior al valor de las dos entradas.
Por ejemplo:
[PM∈(μ(e(t))]∩[PM∈(μ(de/dt))]⇒PG
Caso 2 (zona de la tabla 1, acciones agrupadas como a2)
(μ(e(t)) ∩(μ(de/dt)) ⇒La acción que se debe tomar es la inmediatamente superior al valor de las dos entradas.
Por ejemplo:
[NM∈(μ(e(t))]∩[NM∈(μ(de/dt))]⇒NG
Caso 3 (zona de la tabla 1 acciones agrupadas como a1). Elementos (μ(e(t)) son PP y PM. Elementos de (μ(de/dt)) son NG y NM)
(μ(e(t)) ∩(μ(de/dt)) ⇒La acción que se debe tomar es la de frenar la tendencia rápida. Será una acción negativa cuya intensidad será la inferior posible de entre las dos intensidades de las variables de entrada.
Por ejemplo: [PP∈(μ(e(t))]∩[NG∈(μ(de/dt))]⇒(Inferior a P no puede haber (no es posible), pero inferior a G sí es posible, y es M). Por tanto, la salida es NM.
Por ejemplo: [PM∈(μ(e(t))]∩[NG∈(μ(de/dt))]⇒(Inferior a M puede ser P, e inferior a G si, puede ser M), al ser posibles las dos se toma la menor, que es P. La salida es NP.
Caso 4 (zona de la tabla 1, acciones agrupadas como a3. Elementos (μ(e(t)) son NM y NP. Elementos de (μ(de/dt)) son PM y PG).
(μ(e(t)) ∩(μ(de/dt)) ⇒La acción que se debe tomar es la de frenar la tendencia rápida. Será una acción positiva cuya intensidad será la inferior posible de entre las dos intensidades de las variables de entrada.
Por ejemplo: [NP∈(μ(e(t))]∩[PG∈(μ(de/dt))]⇒(Inferior a P no puede haber (no es posible), pero inferior a G sí es posible, y es m). Por tanto, la salida es PM.
Por ejemplo:
[NM∈(μ(e(t))]∩[PG∈(μ(de/dt))]⇒(Inferior a M puede ser P, e inferior a G sí, puede ser M), al ser posibles las dos, se toma la menor que es P. La salida es PP.
Caso 5 (zona de la tabla 1, acciones agrupadas como a3. Elementos
(μ(e(t)) son NG y NM. Elementos de (μ(de/dt)) son PP y PM).
(μ(e(t)) ∩(μ(de/dt)) ⇒La acción que se debe tomar es la de acelerar la tendencia lenta. Será una acción positiva cuya intensidad será la inferior posible de entre las dos intensidades de las variables de entrada.
Por ejemplo:
[PG∈(μ(e(t))]∩[NP∈(μ(de/dt))]⇒ (Inferior a G es posible y es M, pero inferior a P no puede haber [no es posible]). Por tanto, la salida es PM.
[PM∈(μ(e(t))]∩[NP∈(μ(de/dt))]⇒ (Inferior a M puede ser P, pero inferior a P no puede haber [no es posible]). Por tanto, la salida es PP.
Caso 6 (zona de la tabla 1, acciones agrupadas como a1. Elementos (μ(e(t)) son PM y PG. Elementos de (μ(de/dt)) son NM y NP).
(μ (e(t)) ∩ (μ(de/dt)) ⇒ La acción que se debe tomar es la de acelerar la tendencia lenta. Será una acción negativa cuya intensidad será la inferior posible de entre las dos intensidades de las variables de entrada.
Por ejemplo:
[NG∈(μ (e(t))]∩[PP∈(μ(de/dt))]&Arr; (Inferior a G es posible y es M, pero inferior a P no puede haber [no es posible]).
Por tanto, la salida es NM.
Por ejemplo:
[NM∈(μ (e(t))]∩[PP∈(μ(de/dt))]&Arr; (Inferior a M puede ser P, pero inferior a P no puede haber (NO ES POSIBLE), por tanto la salida es NP.
Caso 7 (zona de la tabla 1, acciones agrupadas como elementos de la matriz diagonal tipo a1 CE, a3. Elementos (μ(e(t)) son PG, PM, PP, CE, NP, NM y NG. Elementos de (μ(de/dt)) son NG, NM, NP, CE, PP, PM y PG).
Recordando lo dicho anteriormente: «Si e(t) tiene la misma intensidad que su tendencia entonces ∆U = O» esto significa que a igualdad la acción es nula. Se decide no hacer actuación.
Caso 8 (zona de la tabla 1 acciones agrupadas como elementos de la matriz tipo b1, b2, b3, CE, b4, b5, b6 y c1, c2, c3, CE, c4, b5, c6. Elementos (μ(e(t)) son PG,PM,PP, CE, NP,NM y NG. Elementos de (μ(de/dt)) son NG, NM, NP, CE,PP, PM y PG).
La acción sigue a la variable difusa que no sea nula, pero tomando las intensidades máxima (es decir, G) como la inmediatamente inferior (M).
Por ejemplo:
[CE∈(μ (e(t))]∩[PG∈(μ(de/dt))]&Arr; PM
Por ejemplo:
[NG∈(μ (e(t))]∩[CE∈(μ(de/dt))]&Arr; NM
NOTA: ∆U se tomará como la acción resultante de (μ(e(t))∩(μ(de/dt))
A partir de estas operaciones y álgebra así definida, se puede entonces establecer el motor de interferencia de la tabla 2.
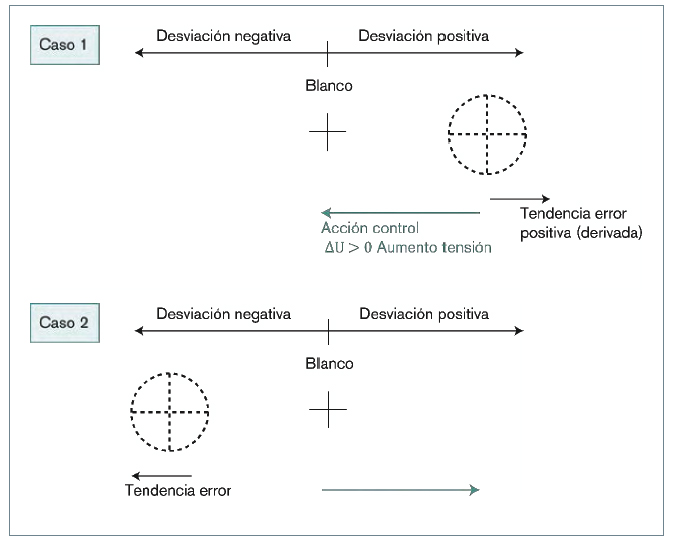
Un ejemplo práctico (tipo balístico) que la tabla 2 sigue y que ayuda a la comprensión de esta álgebra así definida, habida cuenta de nuestra experiencia en controladores PI, puede hacerse en la colocación sobre el blanco de un cañón de tanque en su movimiento horizontal de izquierda a derecha.
Suponiendo que el blanco está en el centro, se entenderá que una desviación (error) es positiva si el cañón va hacia la derecha y negativa hacia la izquierda. Así la tendencia (derivada del error) llevará el mismo criterio cartesiano.
La acción será positiva P (∆U>0)cuando se emitan pulsos de subida de tensión hacia el encoder encargado de mover el motor desde la derecha hacia la izquierda buscando el centro (blanco).
La acción será negativa N (∆U<0)cuando se emitan pulsos de bajada de tensión hacia el encoder encargado de mover el motor desde la izquierda hacia la derecha buscando el centro (blanco).
En efecto, son las figuras que representan las posiciones y tendencias que puede adoptar el cañón (figuras 8A y B8).
Se puede observar que la lógica heurística afirma que si p y q, entonces Z
O dicho de otro modo, (p ˄q) →Z
De estaexpresión se obtienen las diferentes operaciones que se marcan en la tabla 2.
Desfusificación
Así, una asignación razonable de funciones de pertenencia de μ(e) y μ(de/dt)la podemos hacer sobre un universo de discusión normalizado entre los valores -1 y 1 utilizando funciones tipo L, lambda y triangulares cuyos valores irán desde 0 hasta 1 en el eje de ordenadas.
Así quedará lo siguiente:
Una vez hecho esto tenemos que convertir las variables difusas en valores nítidos. Es decir, las acciones tendrán que tener valores numéricos. A este proceso se le llama desfusificación.
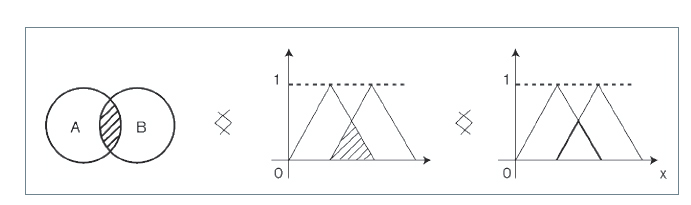
Al entrar los valores de los conjuntos difusos (e) y (de/dt) en la tabla de interferencia se interceptarán dos funciones siempre para μ(e) y otras dos para μ(de/dt). Por tanto, el análisis involucra a cuatro celdas de la tabla, es decir, cuatro curvas.
Acorde a las leyes de la lógica heurística,
la intersección de dos conjuntos difusos
se hace a través de la función de pertenencia
de cada uno de los conjuntos
participantes según refleja la figura 10.
μ A∩B= mín {μA(x), !b(x)} A x ∩U, donde U es el espectro de discusión.
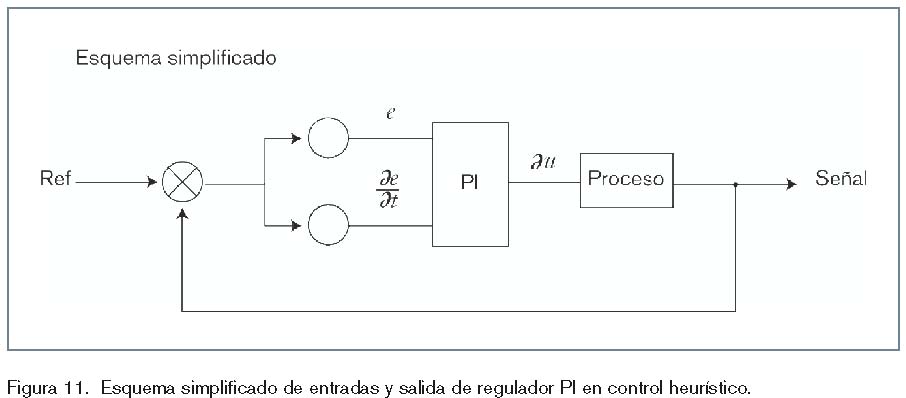
Un esquema simplificado sobre el proceso de entradas y salida del regulador PI según criterios heurísticos es acorde a la figura 11.
Ejemplo numérico
Así, tomando por ejemplo (figuras 12):
e = 0,8 y de/dt = – 8/30 = (-0,26667)
Denotaremos el valor nítido de la acción como:
Ui(du) = mín(Z, Ui(dU) ); donde Ui(dU)=Ui(e)∩Ui(de), resultado del álgebra definida en la tabla 4.
Z = mín (Ui(e), Ui(de))
Finalmente, hechos estos cuatro análisis, la variable de control a usar dU la obtenemos usando el centroide de la

figura que se forma.
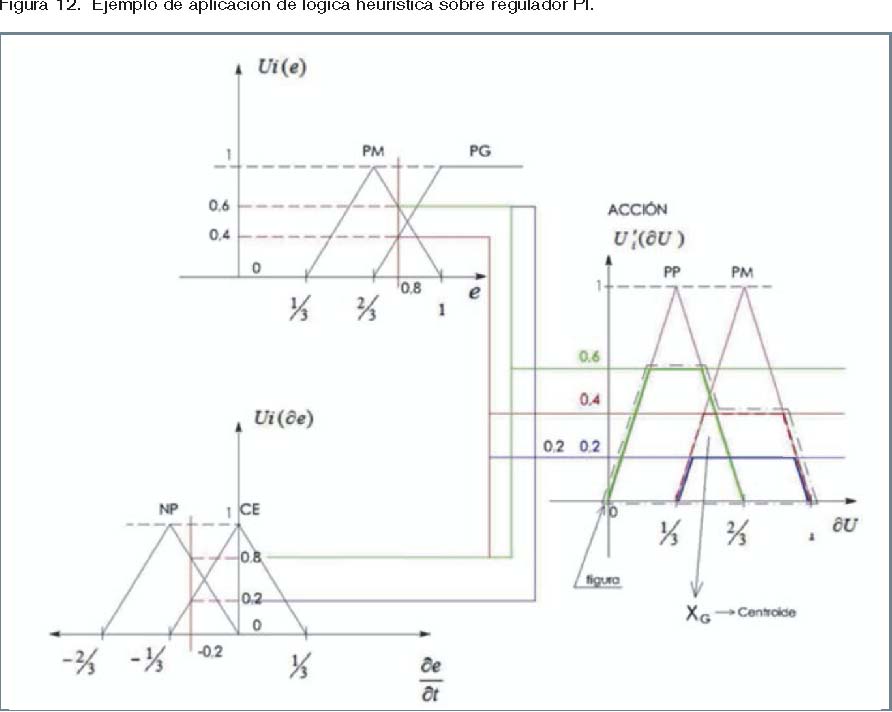
Es decir, de todas las posibilidades barajadas a partir de los dos valores, la acción mejor es dar al regulador una salida 0,52 en aumento con respecto a la anterior para corregir el error anterior.
Conclusiones
Con las herramientas creadas en el cerebro del regulador, ante un error y una tendencia del mismo, lo que hace el cerebro es sacar una decisión. La forma de hacerlo es como se ha explicado. La explicación es válida también para variable discreta.
Bibliografía
Universidad de Málaga (2013). Teoría de Conjuntos Difusos y Lógica Difusa. Disponible en: http://www.lcc.uma.es/~eva/aic/apuntes/fuzzy.pdf. (Consultado en febrero de 2013)