

Incorporación de la industria 4.0 y de la robótica colaborativa en la formación universitaria
Incorporation of industry 4.0 and collaborative robotics in university education
Miguel Ángel Mariscal1, Susana García2, Sergio Ortiz3 y Eva María López4
Abstract
Development and implementation of the enabling technologies of industry 4.0 need to be introduced into engineering studies. A collaborative robotics practice is shown in a subject, through the use of different methodologies, to be able to impart knowledge with one single cobot in the classroom, through simulation software.
Keywords: Industry 4.0, cobot, simulation, technology.
Resumen
Es necesario introducir el desarrollo y la implementación de las tecnologías habilitadoras de la industria 4.0 en los estudios de ingeniería. Se muestra una práctica de robótica colaborativa en una asignatura, a través del uso de distintas metodologías para poder impartir los conocimientos con un solo cobot en el aula, a través de software de simulación.
Palabras clave: Industria 4.0, cobot, simulación, tecnología.
Recibido / received: 18/06/2022. Aceptado / accepted: 05/10/2022.
1-3 Departamento de Ingeniería de Organización, Escuela Politécnica Superior, Universidad de Burgos.
4 Departamento de Ciencias de la Educación, Facultad de Educación, Universidad de Burgos.
Autor para correspondencia: Miguel Ángel Mariscal; e-mail: mariscal@ubu.es
Introducción y objetivos
En el contexto que nos encontramos está implantándose una transformación digital irreversible, que en algunos casos no está incluida en los planes de estudio.
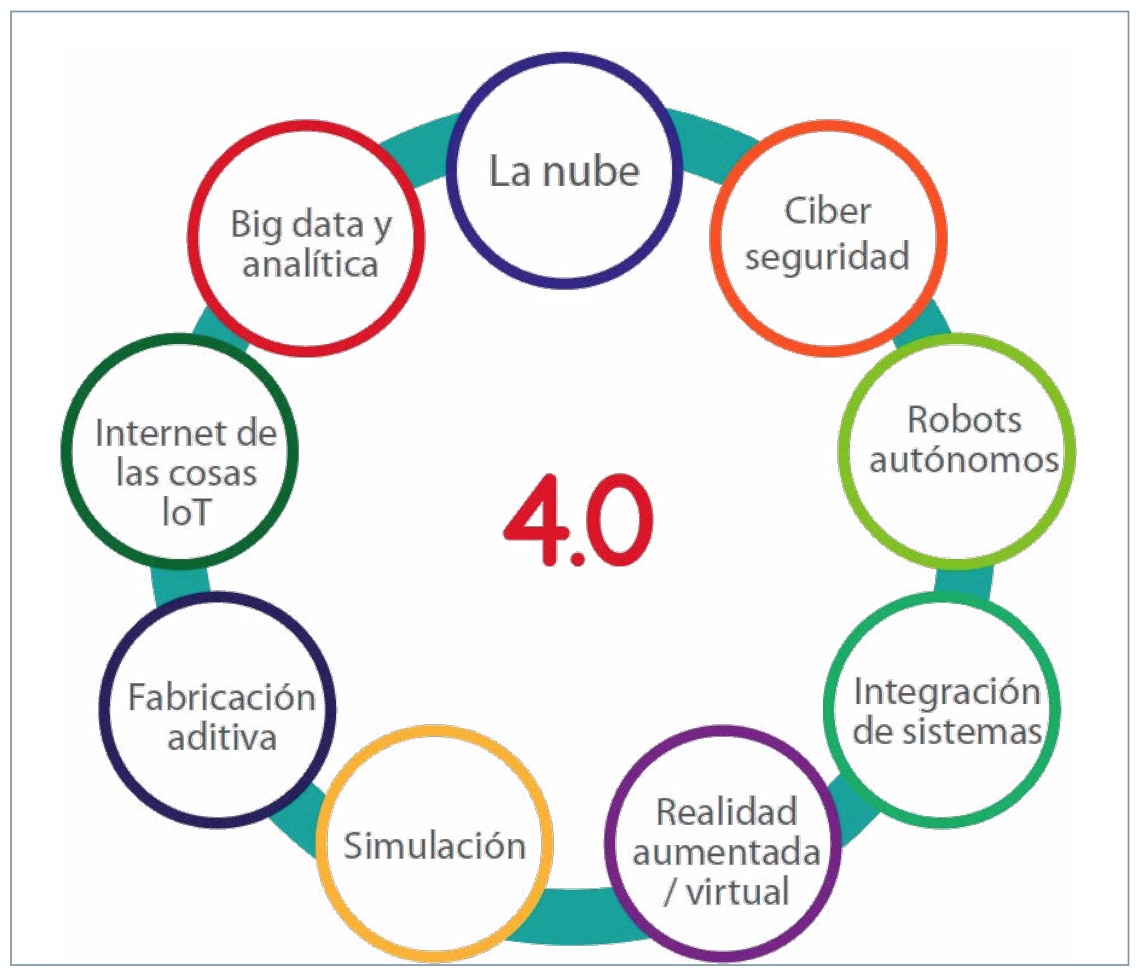
El término industria 4.0 surgió en Alemania a principios de la década de 2010 (Blanco, 2017). Su concepto es extremadamente amplio, pero podría resumirse en un proceso de transformación digital de la industria, en la cual se implementan una serie de tecnologías habilitadoras para hiperconectar todos los elementos, tanto productivos como de sistemas de información del tejido empresarial y, de esta manera, dinamizar la producción, mejorar la competitividad y asegurar mejores estándares de calidad.
La industria 4.0 es una etapa que trae mayor automatización, hiperconectividad, control de cada mínimo aspecto del proceso productivo, unión de sistemas físicos y ciberfísicos, almacenamiento masivo de información, biotecnología, computación cuántica, realidad virtual, conducción autónoma, ciberseguridad y una interminable lista de aplicaciones ligadas a las nuevas tecnologías.
Dentro de la llamada industria 4.0 (Blanco, 2017), surge como una de las tecnologías habilitadoras la robótica colaborativa, que, con sus ventajas sobre la robótica tradicional, es necesario que la conozca el alumnado, así como la adquisición de competencias para poder implantarla.
Como se puede ver en Mariscal (2020), la implantación y crecimiento del número de cobots en España está siendo muy importante, por lo que la formación y el conocimiento por parte del alumnado se considera importante.
En el Máster en Ingenieria Industrial de la Universidad de Burgos, existe la asignatura en el primer cuso de “dirección de la producción y proyectos”, en la cual se incluyen como competencias transversales las siguientes:
ED-13 Conocimientos de sistemas de información a la dirección, organización industrial, sistemas productivos y logística y sistemas de gestión de calidad.
ED-14 Capacidades para organización del trabajo y gestión de recursos humanos. Conocimientos sobre prevención de riesgos laborales.
ED-15 Conocimientos y capacidades para la dirección integrada de proyectos.
EP-2 Dirigir, planificar y supervisar equipos multidisciplinares.
EP-3 Realizar investigación, desarrollo e innovación en productos, procesos y métodos.
EP-4 Realizar la planificación estratégica y aplicarla a sistemas tanto constructivos como de producción, de calidad y de gestión medioambiental.
EP-5 Gestionar técnica y económicamente proyectos, instalaciones, plantas, empresas y centros tecnológicos.
EP-6 Poder ejercer funciones de dirección general, dirección técnica y dirección de proyectos I+D+i en plantas, empresas y centros tecnológicos.
EP-8 El ejercicio de la docencia en los términos que precise la normativa vigente.
La aparición de la robótica colaborativa hace que en varias de ellas sea necesario conocer dicha tecnología. Se señalan en el listado anterior en negrita las que pueden alcanzarse mediante la práctica con cobots.
También dentro de la misma asignatura, como objetivos docentes se encuentran:
• Capacitar al alumno para la elaboración y dirección de proyectos.
• Dotar al alumno de los conocimientos fundamentales para el diseño de sistemas productivos y para la gestión de la producción.
• Capacitar a los alumnos para integrar la producción con prevención de riesgos laborales, calidad, medio ambiente y el resto de unidades de gestión de la empresa.
• Preparar al alumno para que pueda gestionar, planificar y realizar el seguimiento de proyectos.
También se señalan en negrita los objetivos docentes que se pueden alcanzar con la práctica desarrollada. Finalmente, los contenidos de la asignatura son los siguientes:
Capítulo 1. Sistemas de información a la dirección.
Capítulo 2. Organización industrial.
Capítulo 3. Sistemas productivos y logística.
Capítulo 4. Sistemas de gestión de calidad.
Capítulo 5. Dirección integrada de proyectos.
Capítulo 6. Organización del trabajo.
Capítulo 7. Prevención de riesgos laborales.
Los objetivos de la incorporación de esta práctica dentro de la asignatura son:
• Incorporar una práctica de robótica colaborativa en una asignatura universitaria.
• Diseño de una práctica de programación de un robot colaborativo para poder ser realizada por un número elevado de alumnos, simulando con 1 cobot real. Pese a la escasez de recursos (1 cobot) para un curso con un número elevado de alumnos, preparar un ejercicio de programación de un cobot a través de software, para luego probar el programa en el cobot físicamente.
Metodología
Los contenidos de industria 4.0, empresa digital y robótica colaborativa se desarrollan en 8 horas, 4 de teoría y 4 de laboratorio.
En la parte de teoría se desarrolla:
– Qué es industria 4.0. Origen, definición, tecnologías habilitadoras.
– Qué es la robótica colaborativa. Definición. Demostración con un cobot
En la parte de práctica de laboratorio se desarrollan dos actividades:
• Programación de un cobot para la realización de un trabajo, mediante un simulador en aula de informática de la tableta de programación.
• Con la programación de cada alumno, se acude al laboratorio para ejecutar el programa diseñado y ver su funcionamiento.
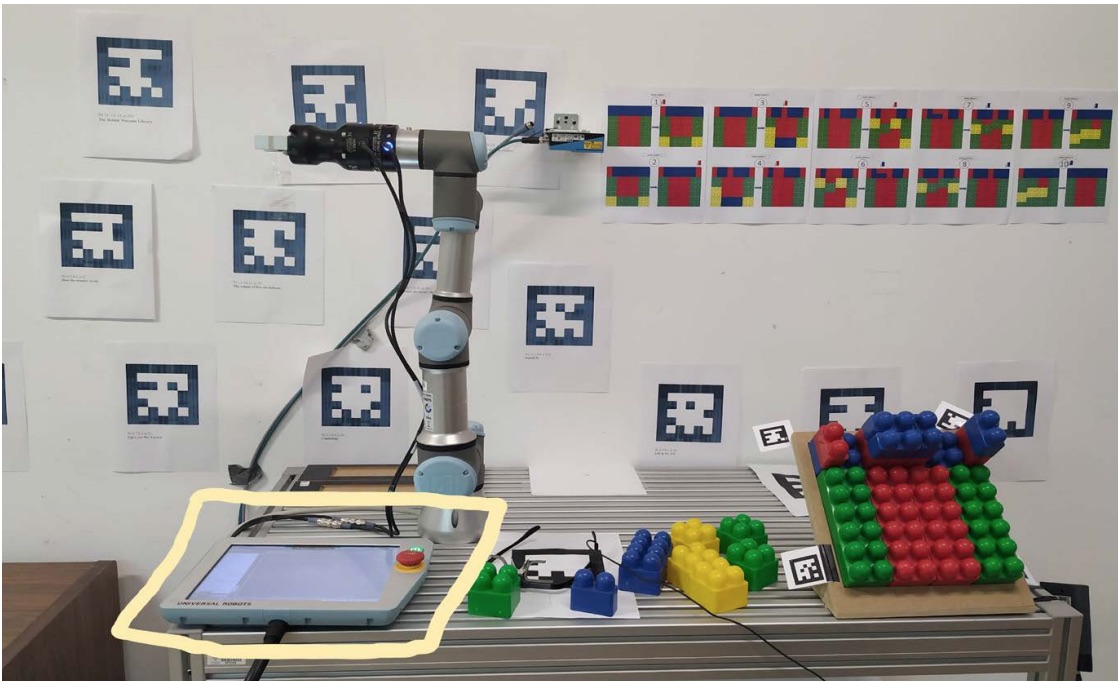
• En función del resultado del apartado anterior, se reprogramará el cobot en el aula de informática, para volver a ejecutarlo en el laboratorio hasta su correcta ejecución. En el laboratorio se dispone de un robot colaborativo UR3, con su tableta de programación, como se puede ver en la figura 2.
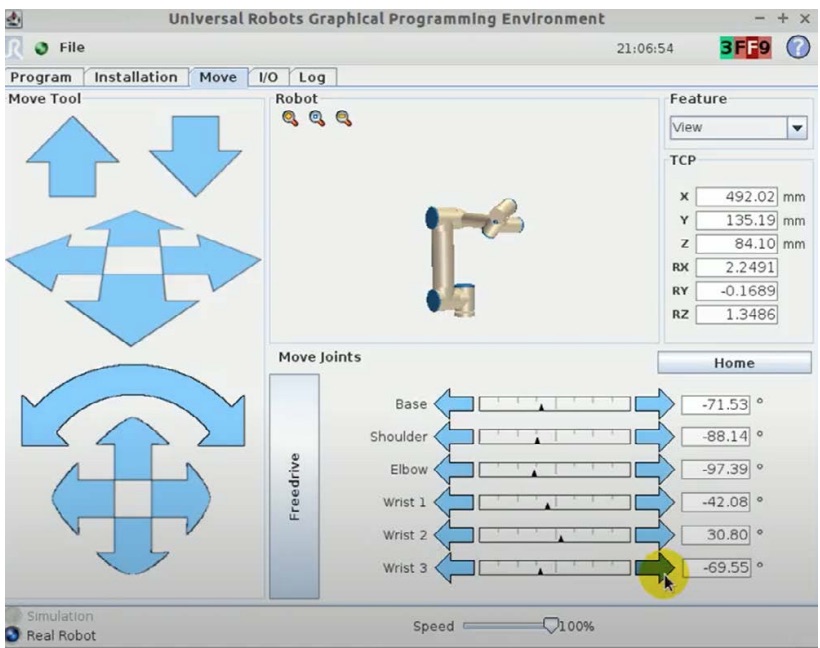
El problema existente es que para más de cinco alumnos, se hace complicado programar con la tableta. Por eso, se ha considerado la instalación de un software de programación. El URSim on Linux se ha instalado para poder realizar la práctica en el aula de informática; se puede pasar el programa diseñado al UR3 y ver su funcionalidad. Un ejemplo del software se muestra en la figura 3.
Resultados
La práctica diseñada, desarrollada para que realicen los alumnos en el software del aula, es la siguiente:
Se requiere aplicar un cordón de silicona de manera uniforme sobre una pieza para un proceso productivo. La velocidad de la herramienta debe ser constante a lo largo del recorrido y debe empezar la aplicación con la velocidad ya adquirida y detener el movimiento instantes después tras finalizar la aplicación, para que no se formen zonas irregulares. Se debe elegir el tipo de movimiento adecuado para tal misión y seguir la trayectoria indicada en la imagen, que se compone de dos rectas paralelas unidas por una semicircunferencia.
Cada 10 ciclos de aplicación se debe realizar una limpieza de la punta de la herramienta, que consiste en hacerla pasar de manera rectilínea por una zona destinada a tal efecto. Siempre que se ponga en marcha el robot con un bote ya empezado después de haber estado apagado, se hará pasar la punta por la zona de limpieza.
La herramienta soporta un bote de silicona que debe ser sustituido cada 30 ciclos, por lo que cada 30 ciclos a partir del reemplazo del mismo, se debe mostrar un mensaje de advertencia y se debe colocar la herramienta en un lugar que permita al operario cambiar el bote gastado. Cuando el bote ha sido repuesto, el operario pulsa “ok” en la pantalla y después un botón para seguir con el proceso. Ese mismo botón permite posicionar el robot en la zona de cambio de bote en cualquier momento del proceso excepto en el momento de limpieza (si se pulsa en el momento de limpieza, la orden quedará pendiente de ser cumplida al finalizar la limpieza). Esto permite una inspección de la herramienta por varios motivos con un accionamiento manual. Cuando se produzca este caso, si se mantiene pulsado el botón durante más de 1,5 segundos para indicar que ha finalizado la inspección, servirá también para indicar que se ha reemplazado el bote (reiniciar contadores).
Los contadores deben guardar su información, aunque el robot se apague.

Conclusiones
La práctica se ha realizado por primera vez en el curso 2021-22 en la asignatura Dirección de la Producción y Proyectos del Máster en Ingeniería Industrial de la Universidad de Burgos.
Dentro de las competencias, contenidos y objetivos de la asignatura se ha actualizado esta con una tecnología que es la robótica colaborativa, de reciente aparición. También se ha cumplido con uno de los objetivos del proyecto financiado por la Consejería de Industria de la Junta de Castilla y León referenciado al final, para difundir las nuevas tecnologías en la formación universitaria.
Dado el elevado número de matriculados, más de 10, se ha podido trabajar con un cobot UR3, aprendiendo su funcionamiento, programación y posibilidades a través de la combinación de clases teóricas, prácticas en aula de informática con un simulador y prácticas con el mismo cobot, sin que el elevado número de matriculados suponga un impedimento.
Es necesario ampliar este ejemplo a materias de grado de la rama industrial, para mejorar las capacidades de dichos alumnos.
Esta inclusión en los contenidos de la asignatura ha sido posible gracias a la financiación de la Consejería de Industria de la Junta de Castilla y León a través de la financiación del proyecto: “La prevención de riesgos laborales en la industria 4.0. Estudio de condiciones de trabajo y simulación de riesgos con robótica colaborativa. Difusión de resultados para la sensibilización en Castilla y León”, de referencia investun/21/bu/0005.
Referencias
Blanco R., Fontrodona J. y Poveda, C. (2017). “La industria 4.0: el estado de la cuestión”. Ministerio de Industria, Comercio y Turismo, recuperado de https://www.mincotur.gob.es/Publicaciones/ Publicacionesperiodicas/EconomiaIn dustrial/ RevistaEconomiaIndustrial/406/BLANCO,%20 FONTRODONA%20Y% 20POVEDA.pdf (acceso: 30-11-2018)
Mariscal, M. A., García S., Gonzalez, J. (2020). Estado de la implantación de la industria 4.0 en las empresas de Castilla y León. Consejo Económico y social de Castilla y León.