
Nuevas actualizaciones para Simulink Control Design con funciones de ajuste de controladores pid
The MathWorks anuncia la disponibilidad de Simulink Control Design 3.0, que incluye nuevas funciones para automatizar el proceso de ajuste de los controladores PID. Estas funciones se presentan junto con los nuevos bloques PID Controller de Simulink.
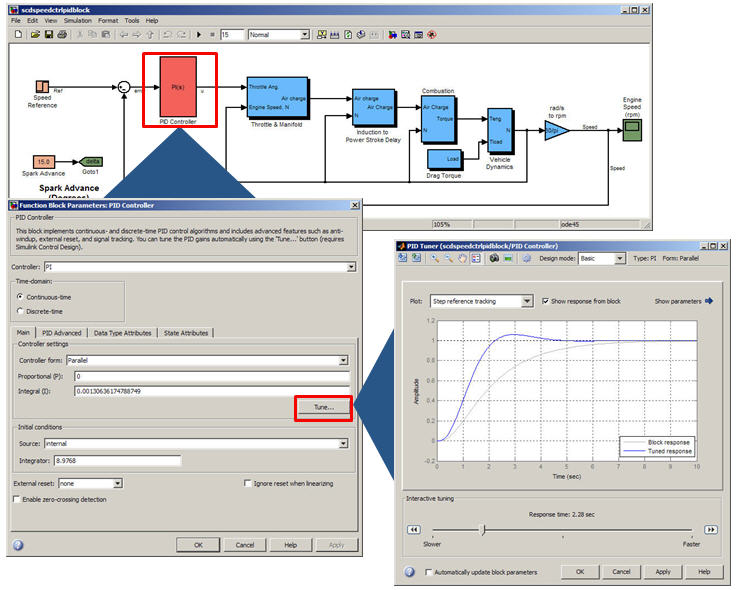
Los ingenieros pueden utilizar estos bloques para crear rápidamente controladores PID, seleccionar la estructura PID, incluir lógica anti-windup en el integrador, convertir de tiempo continuo a tiempo discreto y preparar el controlador para su implementación en un procesador que use aritmética de coma fija.
Un nuevo algoritmo de ajuste de Simulink Control Design 3.0 calcula automáticamente las ganancias del controlador PID, basándose en el margen de fase y el ancho de banda del sistema deseados. La nueva interfaz de usuario permite el ajuste visual de los controladores PID para todo tipo de modelos de planta, sin necesidad de conocimientos especializados en la teoría de control. El diseño resultante puede verificarse mediante la simulación en Simulink, lo que reduce el tiempo necesario para realizar el ajuste y las pruebas en caros prototipos de hardware. Los ingenieros pueden utilizar a continuación Real-Time Workshop para generar automáticamente código para su implementación en microcontroladores.
Las nuevas funciones de Simulink Control Design 3.0 incluyen:
-Nueva funcionalidad para análisis lineal avanzado. Los usuarios ahora pueden calcular la respuesta en frecuencia de los modelos de Simulink mediante la simulación. Esto ayuda a los ingenieros a linealizar más fácilmente los modelos de Simulink que tienen discontinuidades o dinámica basada en eventos, sin necesidad de modificar el modelo.
-Posibilidad de personalizar la linealización de bloques y subsistemas de Simulink. Los ingenieros pueden, por ejemplo, marcar un bloque de ganancia (Gain) como incierto y linealizar el modelo para crear un sistema con incertidumbre. Utilizando Robust Control Toolbox con este sistema, los usuarios pueden diseñar un controlador que cumpla los requisitos de estabilidad y rendimiento en presencia de incertidumbre.