Replicar en robots la conducta humana
Precisión, autonomía y destreza en los robots son los objetivos de algunas de las líneas de investigación en las que varios equipos españoles trabajan para dotarlos de complejidad
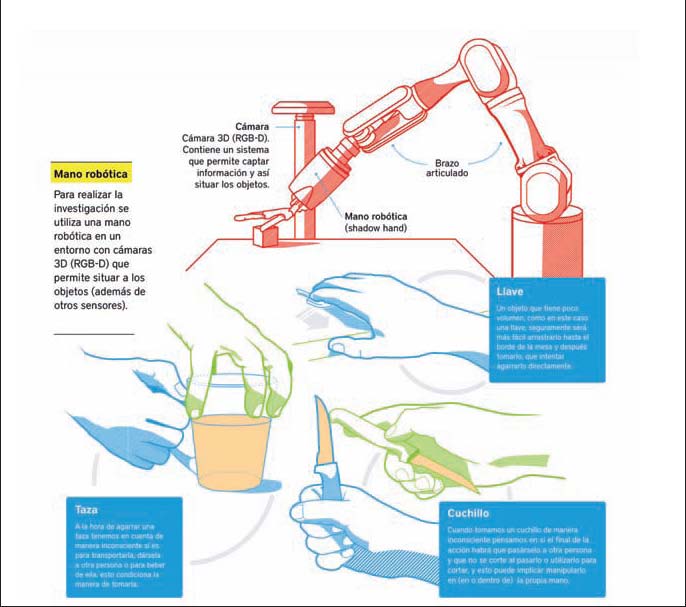
Distintos proyectos financiados por la Unión Europea persiguen una robótica más humanoide. Algunas universidades españolas se suman a ellos con buenos resultados. Investigadores del Roboticslab, de la Universidad Carlos III de Madrid (UC3M), participan en el proyecto internacional Handle con el objetivo de conseguir que una mano robótica reproduzca las habilidades y movimientos de una mano humana.
Manipulación óptima
“Además de los avances tecnológicos perseguidos, se trabaja con aspectos fundamentales de la investigación multidisciplinar con el fin de dotar al sistema de mano robótica de capacidad de percepción avanzada, control de alto nivel de información y elementos de inteligencia que permitan el reconocimiento de objetos y el contexto de las acciones”, explica el investigador principal del proyecto, Mohamed Abderrahim, del Departamento de Ingeniería de Sistemas y Automática de la universidad madrileña.
La búsqueda de una mano robotizada autónoma es una constante de la robótica. Una mano de este tipo que es capaz de hacer esta tarea aparentemente sencilla de forma autónoma –afirma Abderrahin– solo existe en películas de ciencia-ficción. “Mi estimación personal es que se necesitarán unos 15 años investigando en estos temas para alcanzar una mano robótica capaz de realizar ciertas tareas complejas con un grado de precisión, autonomía y destreza similares a la mano humana”.
La mano robótica con la que trabajan los investigadores de la UC3M se compone en su mayoría de piezas de aluminio y plástico mecanizado de alta precisión, además de sistemas de sensorización y actuación. En total, dispone de 20 actuadores y puede realizar 24 movimientos, los mismos que la mano humana. Su tamaño también es igual que la extremidad media de un varón adulto y tiene un peso de aproximadamente cuatro kilos.
Movimiento y visión
Por otra parte, para conseguir que la ciencia-ficción sea realidad, la Universidad Jaume I de Castellón está inmersa en el proyecto Eyeshots, que tiene como meta controlar la interacción entre el movimiento y la visión con el fin de replicar en robots el comportamiento humano. Según Ángel Pasqual del Pobil, jefe del Laboratorio de Inteligencia Robótica de la universidad, su equipo validó los hallazgos del consorcio europeo que participa en el proyecto empleando un sistema oculomotor desarrollado por su universidad. Dicho sistema consta de un torso con brazos articulados y una cabeza robótica con ojos móviles.
La primera característica del sistema visual humano que se propusieron reproducir artificialmente fue el movimiento ocular sacádico, que está relacionado con el cambio dinámico de la atención. “Constantemente cambiamos el punto de vista en unos movimientos de los ojos muy rápidos. Tanto que nosotros casi no somos conscientes”, apunta Pobil. “Cuando los ojos están en movimiento, la imagen es borrosa y no somos capaces de percibirla nítidamente. De modo que el cerebro integra los fragmentos como si se tratase de un puzle para darnos la impresión de una imagen continua y perfecta del entorno”.
A partir de los registros neuronales, el equipo ha desarrollado modelos informáticos de la sección del encéfalo que integra las imágenes con los movimientos de ojos y brazos. Según sus responsables, se trata de un modelo excepcional. “No es que a partir de los ojos el cerebro calcule una posición y entonces el brazo se mueva a esa posición, sino que es mucho más directo: al mirar los ojos a un punto, los ojos le dicen al brazo dónde tiene que ir”, explica Pobil. “Todo esto se va aprendiendo durante las etapas de desarrollo: los bebés no conocen esa relación pero se aprende a base de conectar neuronas. Nuestros hallazgos se pueden aplicar a cualquier robot humanoide del futuro con capacidad para mover los ojos y enfocarlos a un punto”, asegura el investigador español.