
Aplicaciones del control proporcional inalámbrico
RESUMEN
El control proporcional inalámbrico del movimiento de mecanismos, sentido de giro y velocidad de pequeños motores se puede realizar mediante el empleo de ondas de radiofrecuencia proporcionadas por los modernos sistemas de radio basados en la emisión modulada por posición de pulso, conocida comúnmente como PPM (pulse position modulation). Este sistema de control proporcional vía radio se denomina Colpra (COntroL Proporcional vía RAdio). Las aplicaciones más frecuentes donde encuentra su utilidad son el accionamiento de servos comerciales, que actualmente pueden incorporar motores especiales como los coreless y los motores brushless, además del control de motores de continua tanto en su sentido de giro como en su velocidad. En las aplicaciones de un accionamiento proporcional inalámbrico para motor de continua se introduce como novedad el llamado PIC (microprocesador tipo RISC), con lo que se obtiene un control proporcional total tanto de la velocidad como de su sentido de giro. Gracias al firmware o programación que se puede implementar en estos dispositivos se abre un campo de control ilimitado.
Recibido: 19 de enero de 2010
Aceptado: 15 de julio de 2010
Palabras clave
Ingenier?a de control, controlador proporcional, controlador PIC, radiofrecuencia
ABSTRACT
The proportional remote control of movement of mechanisms, direction of rotation and speed of small motors, can be achieved by means of radio frequencies provided by modern radio control systems based on Pulse Position Modulation or PPM. This system of proportional radio control is referred to in this article as COLPRA (COntroL Proportional by RAdio). The most frequent applications of this system are the operation of commercial servos, which may currently be equiped with special motors such as coreless or brushless motors, as well as the control of both speed and direction of rotation of continuous current motors. A new development in the application of proportional remote control operation of a continuous current motor, has been the introduction of PIC microcontrollers (RISC type microcontrollers), by means of which a total proportional control is achieved both in terms of speed as well as direction of rotation. The firmware or programming which can be implemented in these devices, opens up an unlimited range of control
Received: January 19, 2010
Accepted: July 15, 2010
Keywords
Control engineering, proportional controller, PIC microcontroller, radio frequency
El control proporcional inalámbrico, es decir, a distancia sin la mediación de ningún tipo de cableado, es, sin duda, una de las metas más atractivas que puede conseguir un técnico en sistemas. El poder controlar a distancia la dirección de movimiento para un mecanismo, o el sentido de giro de un motor a la vez que se realiza un control proporcional de su velocidad de giro, son metas que la tecnología actual nos permite realizar de una forma relativamente sencilla en comparación con los objetivos alcanzados a comienzos del siglo XX en el que el control inalámbrico del tipo todo o nada eran los únicos resultados posibles. El control proporcional inalámbrico, mediante la utilización de ondas de radiofrecuencia, es, sin duda, un gran logro de nuestra tecnología. (El sistema de control proporcional vía radio lo llamaremos para abreviar sistema Colpra: COntroL Proporcional vía RAdio).
Constitución del sistema Colpra
Un sistema Colpra está constituido básicamente por: emisor, receptor, precarga y carga, como indica la figura 1: un equipo emisor, E, de ondas de radio a una determinada frecuencia, moduladas por un sistema de control de la anchura de pulsos genera-dos, comúnmente conocido como sistema PWM (pulse width modulation); un equipo receptor, R, de las ondas de radiofrecuencia, en el que las ondas de radio son detectadas, extrayéndoseles la información PWM con la que se puede controlar de forma proporcional la carga acoplada convenientemente al receptor mediante la precarga; un sistema de precarga o dispositivo condiciona la señal convenientemente para el accionamiento de la carga, y la carga propiamente dicha, que es un micromotor en el caso de los servos industriales o un motor de características determinadas.
En este artículo no vamos a tratar cómo las señales PWM modulan la portadora de radiofrecuencia en el sistema emisor y son demoduladas posteriormente en el equipo receptor, ni de los distintos tipos de modulación AM y FM, pues es materia que se explica ampliamente en los textos dedicados a los sistemas de radiocomunicaciones. A nosotros nos interesa, a efectos de su aplicación, como tratar esa información PWM recogida del receptor de radio con el objeto de controlar proporcionalmente una carga. Por lo que explicaremos básicamente como codificamos la información.
Indicaremos que para dicha codificación se suelen utilizar básicamente dos técnicas de modulación:
PPM.- Pulse Position Modulation (modulación por posición de pulso)
PCM.- Pulse Code Modulation (modulación por codificación de pulso)
Estos sistemas de modulación aunque son muy similares en sus siglas, son total-mente diferentes e incompatibles entre sí.
Técnicas de modulación
Modulación PPM
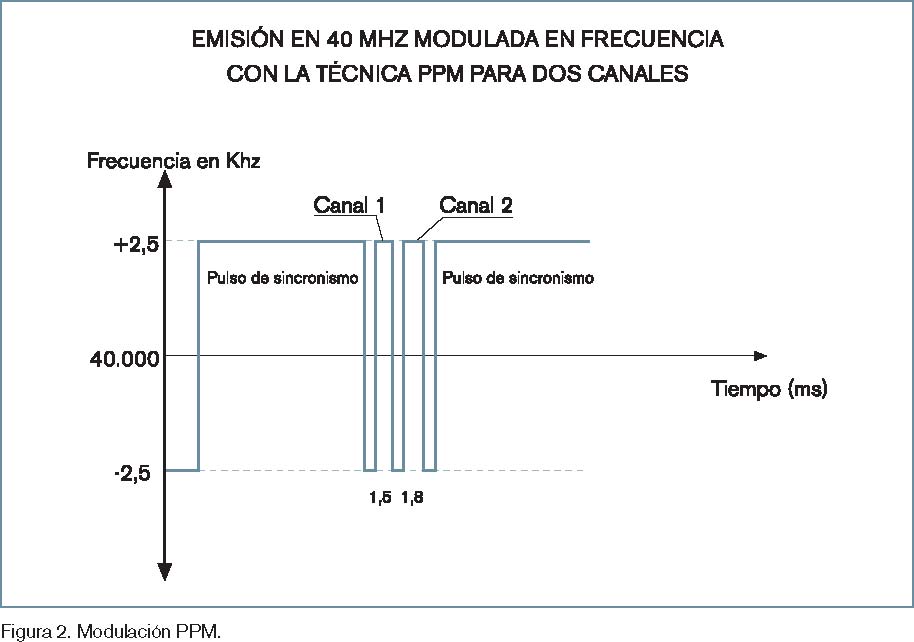
En la modulación PPM el emisor envía un pulso de señal de aproximadamente 300 microsegundos, que constituye la señal de sincronización con el receptor, seguido de un tiempo para cada canal como muestra la figura 2 . El tiempo entre cada pulso se utiliza para realizar el control proporcional. En el caso de que la carga sea un servo este estará centrado aproximadamente cuando los pulsos duren 1,5 microsegundos. De forma que si el pulso dura más, hasta 2 microsegundos, el servo se moverá a la derecha. Si por el contrario dura menos, hasta 1 microsegundo, el servo se moverá a la izquierda.
Gracias a la sincronización el receptor sabe cuando se aplica la señal del canal 1, que aparecerá después de la señal de sincronización. La secuencia de refresco se repite continuamente unas 40 veces por segundo.
En el ejemplo de la figura 2 para dos canales, la señal del canal 1 dura 1,5 milisegundos por lo que el servo conectado a la salida del canal 1 del receptor pasará a posición centrado. Para el canal 2, con una duración de 1,8 milisegundos el servo conectado al canal 2 girará hacia la derecha.

Modulación PCM
En la modulación PCM los pulsos enviados por el emisor están codificados digitalmente en forma de «0» y «1» como indica la figura 3. Por lo que el receptor deberá incluir un dispositivo que sepa leer esta información en código binario. Y claro está este dispositivo es un microprocesador. De esta forma el gobierno del servo se podría realizar, por ejemplo, en 2.048 pasos. Siendo el giro completo a la izquierda el «0», la posición central del servo «1.024 pasos» y el giro completo a la derecha «2.048 pasos».
Podríamos decir de forma muy simplificada que si el emisor para dos canales envía el siguiente paquete de números: 1-1024 – 2 -720. El receptor lo interpretaría como canal 1 centrado, estando en esta situación el servo conectado al canal 1; canal 2, 304 pasos a la izquierda del centro, dando el servo conectado al canal 2 el giro a izquierda con dicha secuencia de pasos.
En la figura 3 se presenta un ejemplo simplificado de la señal PCM del canal 2, donde se envía el paquete de números correspondientes a la codificación en binario del 720. Se deduce que al utilizar un microprocesador este incluirá sistemas de verificación de la señal emitida, por lo que un sistema basado en la modulación PCM es más inmune a interferencias que un sistema basado en la modulación PPM. Por el contrario como el algoritmo matemático utilizado por el microprocesador es distinto para cada fabricante es necesario utilizar únicamente el receptor del mismo fabricante que el emisor PCM.
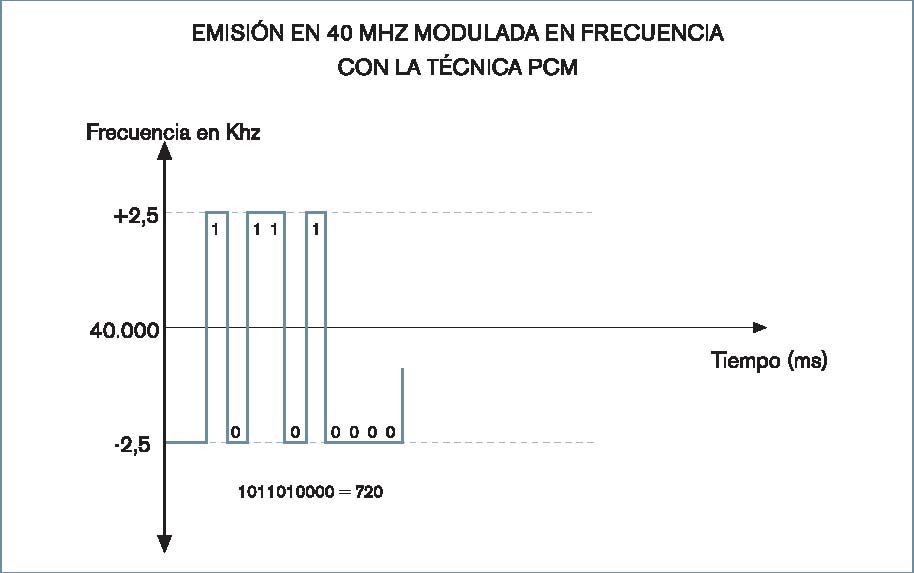 Figura 3. Modulación PCM.
Figura 3. Modulación PCM.Por ello las aplicaciones del sistema Colpra explicadas en este artículo se realizaran con sistemas que utilizan la modulación PPM por ser menos crítica y utilizarse en la práctica con mayor frecuencia.La salida del receptor de radio es un sistema a tres hilos, uno es el positivo de la alimentación, otro es el negativo de la alimentación y referencia de señal y el tercero es la señal PWM de control obtenida de la demodulación PPM realizada en el receptor.
Tipos de sistema Colpra
Se puede por tanto diferenciar entre sistema Colpra para servo y sistema Colpra para motor.El sistema Colpra para servo acciona un servo mecanismo transformando el tren de impulsos PWM en el movimiento mecánico del eje del servo. Los servos son unos instrumentos electromecánicos encargados de convertir en movimiento las instrucciones dadas desde la emisora.
En este caso la precarga se encuentra en la circuitería interior del servo. Y su carga está constituida por el micromotor del servo en conexión con la carga mecánica que tiene que accionar.
Accionamiento de un servo comercial
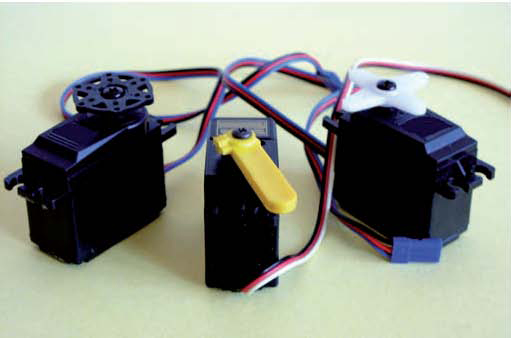
En la salida del receptor de radio a tres hilos tenemos presente la señal de control PWM con la que podemos gobernar directamente un servo de tipo comercial como el de la figura 4.
Los servos comerciales, constan básicamente de un brazo para el accionamiento mecánico exterior de la carga, unido al eje del servo en contacto con una cadena de pequeños engranajes accionados por un micromotor gobernado por un pequeño circuito electrónico que hace la función de precarga. Los engranajes tienen como función reducir la velocidad y aumentar el par del eje de salida. Se fabrican básicamente de nailon, carbonita, metal o titanio, siendo estos últimos de mayor resistencia a la rotura.
Como muestra el diagrama de bloques para un servo de la figura 5 además del circuito electrónico de control los servos disponen de un potenciómetro, que está conectado al eje del brazo de salida del servo, de suerte que al moverse éste, se mueve el potenciómetro y su resistencia varía; esta variación es utilizada por la electrónica del servo para conocer cuanto se ha desplazado el servo. Es por tanto un sistema de retroalimentación, pues según la señal, el circuito suministra al micromotor del servo una corriente que le hace moverse en la dirección deseada. Esto produce por medio de la cadena de engranajes, un movimiento del brazo de salida del servo. El potenciómetro de salida detecta este movimiento variando su resistencia e informando al circuito electrónico de la posición del brazo del servo, de forma que cuanto más próxima sea su posición a la deseada, menor es la corriente que alimenta al motor, y al llegar a la posición mandada por el receptor, el micromotor se para oponiéndose el conjunto del sistema a cambios de esta posición hasta que se comande al servo a una posición diferente, comenzando de nuevo todo el proceso.
El micromotor es el encargado de suministrar la fuerza necesaria para accionar el brazo del servo. Está conectado a la cadena de engranajes que realiza la función de caja reductora convirtiendo la velocidad de giro del micromotor en par de salida del eje conectado al brazo. El micromotor se activa y desactiva de acuerdo a las señales dadas por el circuito de control y éste a su vez recibe las señales del potenciómetro. La calidad del micromotor se refleja en las características del servo. Como micromotor se emplean distintos tipos de motores: motores dc, motores coreless y motores brushless.
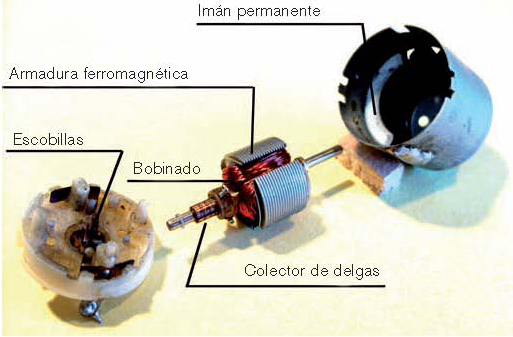
Los motores dc, son motores tradicionales de continua basados en un rotor con armadura ferromagnética en el que se dispone un bobinado, como muestra la figura 6. Este rotor gira dentro del campo magnético producido por unos imanes permanentes que constituyen el estator de la máquina. La energía llega al bobinado mediante el conmutador de delgas alimentado por medio de escobillas; dotadas estas de unos resortes que las empujan para mantener el contacto con el conmutador a medida que se van desgastando, cuando esto sucede por completo el motor deja de funcionar, además tiene el inconveniente de que su inercia impide pararlo rapidamente cuando gira a alta velocidad. Y también presenta un par de retención, como consecuencia de la acción del campo magnético permanente sobre el núcleo ferromagnético del rotor, que necesita vencer en el momento de ponerse en marcha.

Los motores coreless, que por sus características reciben distintos nombres como motor con rotor sin hierro, o motor campana, pues el rotor en cuyo interior se ubica un imán cilíndrico, tiene forma de campana; se diferencian del anterior en que no lleva armadura ferromagnética en el rotor sino sólo un bobinado, estabilizado y encapsulado con una impregnación epoxy, que gira alrededor de un potente imán interno realizado con tierras raras como por ejemplo óxido de samario. Al no tener armadura de hierro en el rotor, se elimina el par de retención que necesita vencer un motor convencional dc para ponerse en marcha. Un motor de estas características por tanto arrancará con un mínimo voltaje, el suficiente para vencer las pérdidas por roce y podrá girar a bajas revoluciones sin problemas, siendo su desaceleración casi instantánea. Además para mejorar el contacto eléctrico, entre las escobillas y las delgas del colector, estas se realizan de plata. Empero este motor sigue teniendo, como el motor normal dc, escobillas, presentándose también el problema del desgaste de las mismas con el funcionamiento del motor.
Los motores brushless, como su nombre indica, no tienen escobillas que induzcan carga y que estén sujetas a desgaste, el motor gira más rápido con mayor rendimiento, velocidad, par y suavidad. El motor brushless es básicamente un motor sincrono trifásico que tiene un rotor con imanes permanentes. Los devanados del estator son alimentados con tensiones de manera que el imán permanente del rotor sigue los campos magnéticos creados por los devanados del estator. Los bobinados de un motor brushless, también llamado BLDC, están distribuidos a lo largo del estator en tres fases con una separación de 120º entre ellas. A diferencia de los motores convencionales dc con escobillas, donde la conmutación entre sus fases se realiza en el colector de delgas; en los motores brushless las corrientes y voltajes aplicados a cada bobinado del motor han de estar controlados mediante una conmutación electrónica realizada por un controlador de motor, según un algoritmo de conmutación implementado. Siendo los más utilizados en la actualidad la conmutación trapezoidal basada en sensores de efecto may, y la conmutación senoidal. Siendo este tema de amplio desarrollo, escapa por tanto a las finalidades de este artículo.
Características de los servos
Las características mas relevantes de un servo son su potencia o par, la precisión o resolución, su velocidad y para ciertas aplicaciones su tamaño y precio.
a) Potencia. Se denomina así a la fuerza que ejerce el brazo del servo a una determinada distancia del eje. Pues si hablamos de un servo de tres kilos se entiende que el servo hace una fuerza de tres kilos a un centímetro de su eje; de forma que a mayor distancia, tendremos menos fuerza. Si por ejemplo, tenemos doble distancia del eje, el servo ejercerá una fuerza de 1,5 kilos.
La potencia se puede aumentar utilizando un motor de alta calidad; como los llama-dos «coreless», es decir sin armadura interna.
Empero el aumento de potencia se debe acompañar de la utilización de engranajes de mayor grosor, o metálicos y se deben utilizar circuitos electrónicos capaces de suministrar mayores corrientes al motor.
b) Precisión. La precisión o resolución de un servo indica la exactitud de movimientos que es capaz de realizar. Un servo de buena calidad tiene una resolución de un 1%, y esta depende de varios factores: diseño de los circuitos, número de polos del motor, holguras del tren de engranajes, etc., etc.
Los buenos servos tienen un tren de engranajes sin holguras, con poca resistencia al giro ya que se suele sustituir el casquillo de giro del eje de salida por rodamientos a bolas, disminuyéndose la resistencia y el desgaste así como la holgura producida. En resumen los rodamientos a bolas en el eje de salida evitan desgaste y holguras que disminuirían la precisión.
c) Velocidad. Se entiende por velocidad de un servo el tiempo que tarda su brazo de salida en recorrer un determinado ángulo. Variando la demultiplicación de la cadena de engranajes se puede ganar velocidad perdiendo potencia. Un servo rápido puede tardar 0,3 segundos en realizar su recorrido normal completo.
En los servos se mide la velocidad como el tiempo que le toma al eje de salida girar 60 grados; estando la medida dada en fracciones de segundo, de suerte que cuanto más bajo sea el valor más rápido será el servo. Si por ejemplo tiene una velocidad de 0,15/60º le tomará al eje de salida 0,15 segundos girar 60 grados.
Utilizando motores «coreless» tendremos un servo de igual tamaño pero con mucha más potencia y utilizando una demultiplicación adecuada, se puede convertir esa mayor potencia en una velocidad mayor.
d) Tamaño y precio. El tamaño y el precio están relacionados de una manera particular, pues existe un tamaño Standard de servo con unos 20 mm de ancho, 40 mm de largo y unos 45 gramos de peso. Si es menor, el precio aumenta de forma inversamente proporcional al tamaño. Quizás por la dificultad de su construcción. Por encima del tamaño Standard tenemos servos grandes de mayor potencia que son también más caros.
Si para un servo determinado utilizamos un brazo más largo, el par y la resolución se reducirán, pero la velocidad será mayor.
Accionamiento de un motor de corriente continua con el sistema Colpra
Para el control de un motor de continua debemos interponer entre el receptor de radio y el motor la precarga, siendo esta un dispositivo conocido como regulador electrónico de velocidad. La precarga consta de dos bloques, uno de ellos, bloque I dedicado al tratamiento de los pulsos PWM obtenidos del receptor de radio y otro, bloque II, dedicado al control directo del motor de continua.
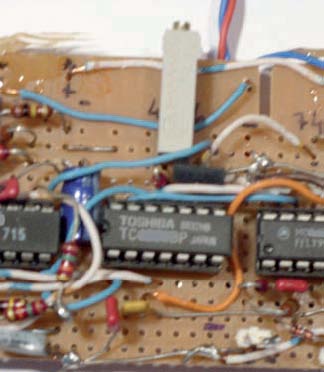
El bloque I se puede realizar utilizando circuitos combinacionales y secuenciales de tipo comercial como el mostrado en la figura 7. Al utilizar amplificadores operacionales en modo comparador, una realización de este tipo necesitará un preset para establecer el nivel de señal adecuado para marcar la diferencia entre el giro del motor a derecha frente al giro a izquierda.
Para reducir el tamaño de los dispositivos empleados podemos realizar el bloque I con un microcontrolador, que dada su aceptación comercial, puede ser del tipo PIC como muestra la figura 8 y de este modo realizaremos el tratamiento de los pulsos PWM mediante el firmware o programa introducido a tal efecto en el PIC. En la figuras 7 y 8 mencionadas se puede apreciar la disminución en tamaño de circuitería según se utilice uno u otro sistema.
Los PIC o PIC-micro son una familia de microcontroladores tipo RISC (Reduced Instruction Set Computer), es decir computadora con conjunto de instrucciones reducidas; fabricados por Microchip Technology Inc.
La tecnología actual dispone de microcontroladores con memoria tipo flash pon lo que la programación firmware se puede modificar muchas veces facilitando su puesta a punto y la corrección de posibles errores. Incluso, con la utilización de los generadores de reloj internos del PIC, no hace falta utilizar control exterior de frecuencia por cuarzo. De esta forma el montaje es más compacto si bien será necesario realizar la correcta calibración del reloj interno del PIC para que no se produzcan errores de frecuencia al correr el programa almacenado en su memoria.
La finalidad del programa será básicamente la de generar unos trenes de pulsos cuyo ancho estará relacionada con la duración de los pulsos PWM obtenidos del receptor de radio y sincronizados con este. Como resultado de aplicar convenientemente lo anterior obtendremos del PIC, como indica la figura 9, una salida «A» que gobernará proporcionalmente el giro del motor en sentido de las agujas del reloj, y otra salida «B» que realizará lo propio para el giro del motor en sentido contrario. Para realizar esto dispondremos del bloque II.
El bloque II estará constituido, en su concepción más completa, para el control proporcional bidireccional, por un puente de transistores mosfet de potencia dispuestos en H, dos de ellos de canal N y otros dos de canal P, cuyo esquema representativo se muestra en la citada figura 9. Si solo fuese necesario el control en un solo sentido de giro prescindiríamos del puente en H y el esquema se simplificaría notablemente.
El sistema básicamente funcionaría de la siguiente forma: la activación a nivel alto de la salida «A» del PIC pondrá en conducción el transistor TR1 que llevará a masa la puerta del MOS1 de canal N, por lo que pasará a conducción; así como el MOS2 de canal P cuya puerta es puesta a nivel alto por la salida «A» del PIC. La conducción simultánea del MOS1 y MOS2 determinan el giro del motor en un sentido a una velocidad proporcional a la duración de los pulsos PWM generados por el PIC en sincronismo con los pulsos provenientes del emisor. La resolución utilizada estará determinada por la impuesta en el firmware programado en el PIC.
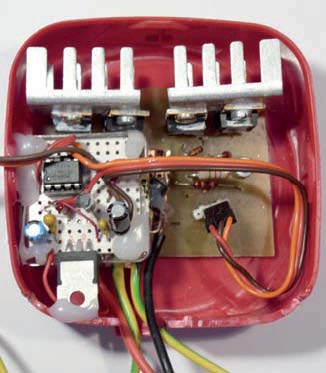
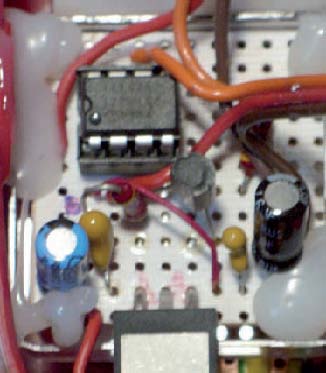
Figura 8. Bloque I realizado con PIC.
La puesta a nivel alto de la salida «B» del PIC determinará la puesta en conducción del transistor TR2 y por consiguiente la puesta a masa de la puerta del MOS3 de canal N que pasará a conducción, así como el MOS4 de canal P cuya puerta ha sido puesta a nivel alto por la salida «B» del PIC. Por lo que la conducción simultánea del MOS3 y MOS4 determinan el giro del motor en sentido contrario al anterior con una velocidad proporcional de igual forma a la duración de los pulsos PWM genera-dos por el PIC en sincronismo con los pulsos provenientes del emisor. Y también en este caso la resolución utilizada estará determinada por la impuesta en el firmware programado en el PIC. De los cuatro mos-fet de potencia dispuestos en H, sólo dos participan en la conducción en un mismo sentido, y otros dos en sentido contrario. Si la capacidad del motor lo demandase se puede aumentar la corriente manejada por el circuito en H disponiendo de mos-fet en paralelo con los ya dispuestos, así como la utilización de algún tipo de refrigeración de los mismos. En la figura 10 se aprecia el conjunto del dispositivo con los refrigeradores dispuestos para los mos-fet.

Cabe indicar que actualmente existen soluciones comerciales a este respecto que se conocen como variadores electrónicos o controladores electrónicos de velocidad que utilizan esta u otra filosofía similar, que se presentan de una forma compacta.
En resumen con el sistema Colpra para motor tendremos un total control proporcional inalámbrico de la velocidad y sentido de giro del motor de corriente continua.
Bibliografía
Schultheiss K (1979). Mando a distancia. Barcelona: Marcombo.
Gueulle P (1991). Telemandos, técnica y realización. Madrid: Thomson-Paraninfo.
Jucker E (1989). Physical Properties of Small DC Motors.